智能寻迹电动玩具小汽车的设计
来源:wenku163.com 资料编号:WK1632645 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK1632645
资料介绍
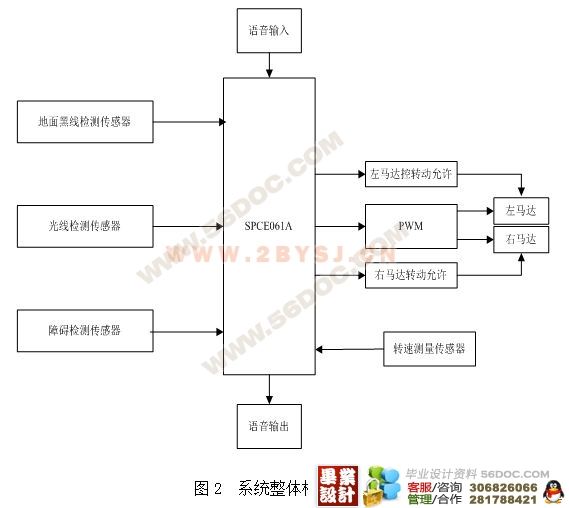
摘 要:本智能玩具车是采用凌阳十六位单片机SPCE061A作为控制核心,对多通道多样化传感器综合控制:通过反射式红外线传感器检测路面黑线、光电三极管检测障碍物及光源、霍尔元件检测转速。并以此为基本框架,结合自动控制原理对玩具车转速进行闭环反馈,使小车运行稳定;通过优化软件算法处理传感器信息,实现了具有一定自适应能力的电动车;采用PWM电路控制电机的转速、H型驱动电路控制电机的转向,实现电动小汽车的正反向行驶、快慢速行驶及转弯;利用凌阳单片机强大的语音辨识与播报功能,实现声控。
关键词:凌阳单片机SPCE061A;直流电机的PWM调速;调节控制;光电检测器
Abstract:This intelligent toy automobile is designed based on the SPCE061A as a micro-controller, gauging its position and posture through various sensors. Among them: making use of reflecting type infrared ray sensor, photo-electricity dynatron and Hall sensor to find the black line, the barriers, find the light and check the rotate speed. The system manages to adapt the environment by using all the sensors comprehensively according to the Theory of automatic Control and a certain optimizing arithmetic. Using PWM direct current machine and the H-shape bridge circuit to adjust the speed and orientation of the automobile. Using the SPCE061A’s capacity of voice distinguishing and displaying to control the automobile by voice.
Keywords:SPCE061A; PWM direct current driving technology
引 言
现代玩具工业在经历了塑料玩具、电子玩具之后,正在向智能玩具时代迈进,并不断地用高科技武装玩具,研发出各种集知识性、趣味性于一体的智能玩具。
智能玩具的各项技术的研发是高端技术的试验田和基础源泉,智能玩具的开发研制将在社会中新技术发展,提高人们生活质量中发挥越来越重要的作用。具体表现在:
(1)为智能玩具应用高端科技提供技术基础支持,学习锻炼的平台;
(2) 智能玩具可开发智力,锻炼技术,提高创新水平。
本文的内容是设计一部智能寻迹电动小车,此设计将寻迹、避障、寻光、声控等功能集为一体,尝试了多通道、多传感器的综合应用,采用了精确的方向控制策略和优化的行进过程的速度控制策略,添加了智能容错功能,使整个系统的稳定性达到了比较高的水平。
毕业设计说明书目录
引言---------------------------------------------------------------15
一:方案的选择与论证-----------------------------------------------15
1.1控制器模块----------------------------------------------------15
1.2 电机驱动模块--------------------------------------------------18
1.3 路面黑线检测模块----------------------------------------------20
1.4 光源检测模块及障碍检测模块------------------------------------21
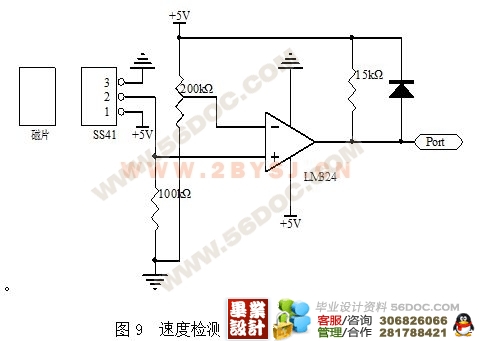
1.5 车速检测模块-------------------------------------------------24
1.6电源模块------------------------------------------------------24
1.7 键盘及显示电路------------------------------------------------25
1.8 小结----------------------------------------------------------25
二:软件系统设计---------------------------------------------------25
2.1 软件的主要特色------------------------------------------------25
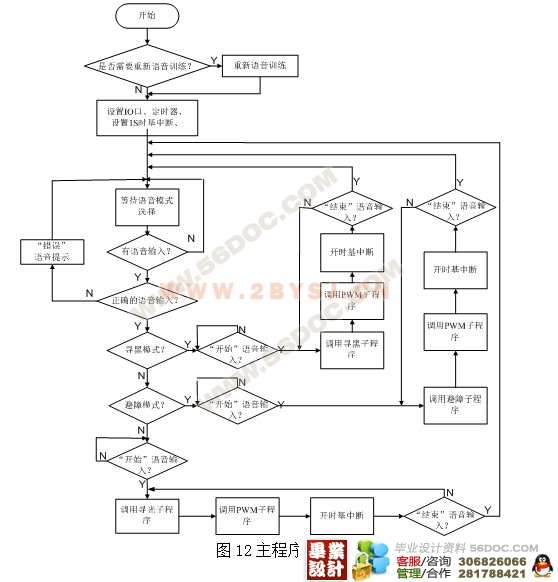
2.2 主程序流程----------------------------------------------------25
2.3 电机驱动子程序流程--------------------------------------------25
2.4 车速检测子程序流程--------------------------------------------25
2.5 车速反馈控制子程序流程----------------------------------------27
2.6定时器服务程序------------------------------------------------28
(毕业设计)
三:系统的硬件实现-------------------------------------------------29
3.1直流电机驱动模块的电路设计与实现------------------------------29
3.2 黑色标志线检测模块的电路设计与实现----------------------------30
3.3 速度检测模块的电路设计与实现----------------------------------32
3.4 电源模块------------------------------------------------------33
3.5 键盘及显示电路------------------------------------------------33
3.6其他功能的设计与实现------------------------------------------33
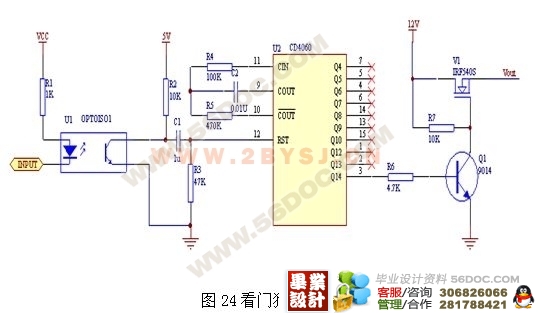
3.7 “看门狗”技术------------------------------------------------34
四:测试数据、测试结果分析及结论-----------------------------------35
五:附录-----------------------------------------------------------37
六:毕业实践总结---------------------------------------------------38
七:参考文献-------------------------------------------------------40
|
