机器人控制软件的设计与实现(AVR)(任务书,毕业论文,13000字,程序)
摘 要
机器人技术作为20世纪人类最伟大的发明之一,自20世纪60年代初问世以来,经历40余年的发展已取得长足的进步。未来的机器人是一种能够代替人类在非结构化环境下从事危险、复杂劳动的自动化机器,是集机械学、力学、电子学、生物学、控制论、计算机、人工智能和系统工程等多学科知识于一身的高新技术综合体。
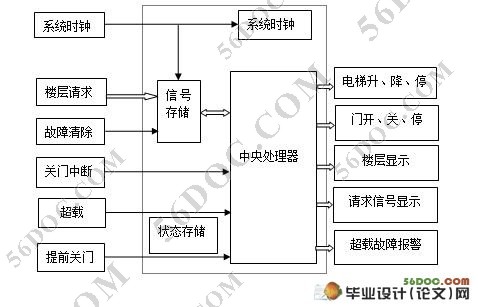
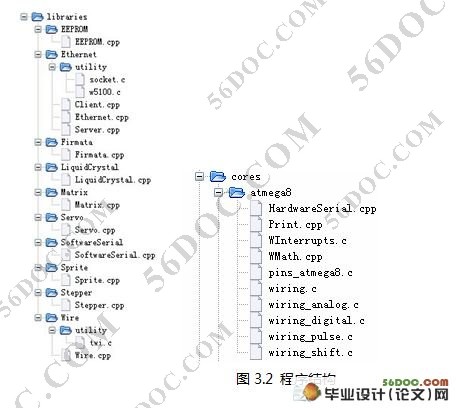
机器人的控制软件开发是和硬件紧密相关的,甚至和机器人的体系结构也密切相关,此次本人开发的机器人软件库通过根据机器人可能做出的行为动作,编写了包括读写EEPROM,固件协议,网络通信,伺服电机,步进电机,硬件串口通信,软件串口通信,LED控制,LCD控制等功能。
此次所编写的机器人软件库是以Atmel公司生产的AVR系列atmega8芯片为主控芯片,通过对该芯片内部资源的利用和芯片外部的设备到达实现上述所说的功能,以此来达到机器人控制的稳定性和实时性。
关键词:机器人,软件库,atmega8
ABSTRACT
One of the greatest inventions of human beings in the 20th century---Robotic technology,since early 1960s,has achieved rapid progress after experiencing sustained development for over 40 years . The future robot will be a kind of automatic machine which can substitute human’s hazardous and intricate work in unstructured environment and it is one of high-tech complex that integrates the knowledge of mechanics, dynamics,electronics,biology,cybernetics, computer, artificial intelligence and system engineering science, and interrelated subjects.
The control software development of robot is closely related to hardware and is even bound up with the system structures of robot itself as well. The robot software library is developed according to possible response of robot.The program writing includes literacy EEPROM, written agreement, network communication, firmware, stepping motor servo motor, software, hardware serial communication serial communication, LED control, LCD control function etc.
The written robot software library makes use of AVR series atmega8 chip production for main control, by the method of using internal resources and chip external equipment to make the above stated functions realized , eventually stability and timeliness of robots can be easily controlled.
Keywords: Robot,software library,atmega8
运行环境
本软件库可在任何拥有GCC,G++编译器和支持AVR系列芯片的IDE中运行,硬件必须是AVR系列的atmega8芯片的主控制板。
基本设计概念与处理流程
本软件库通过C语言去编写芯片及芯片外设的控制模块,通过C++类的方式封装底层硬件控制模块,提供底层软件控制模块,使用户不需要了解底层硬件模块的实现,只需调用软件控制接口的设计思想。

|
