Design of Facility Transfer Robot
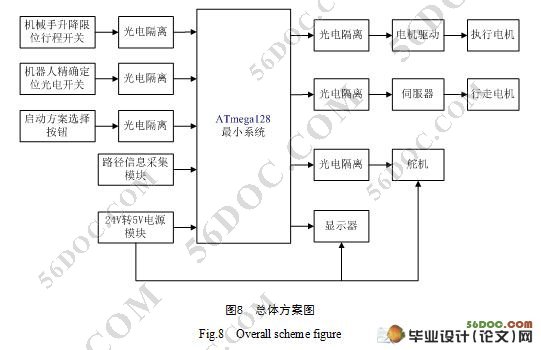
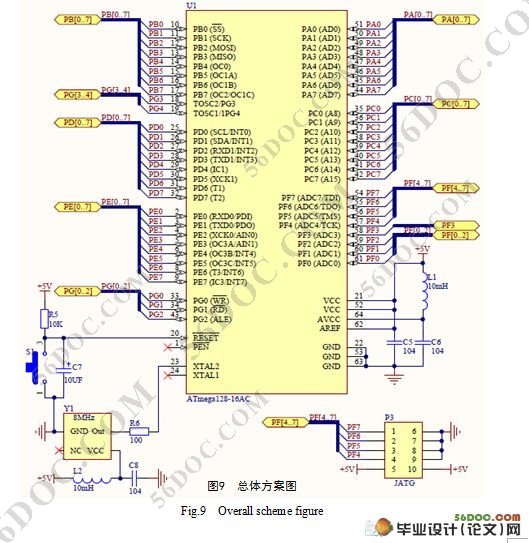
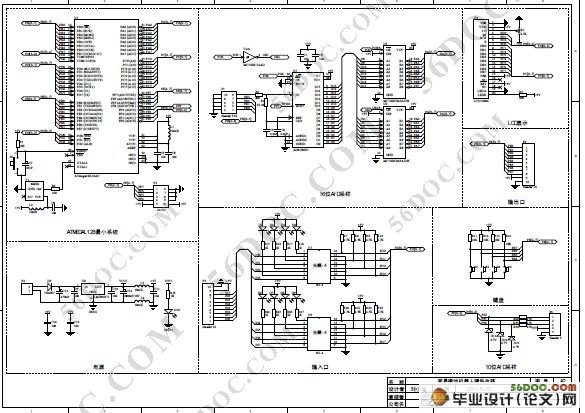
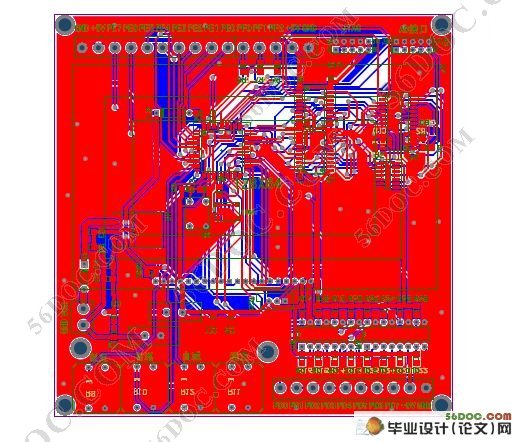
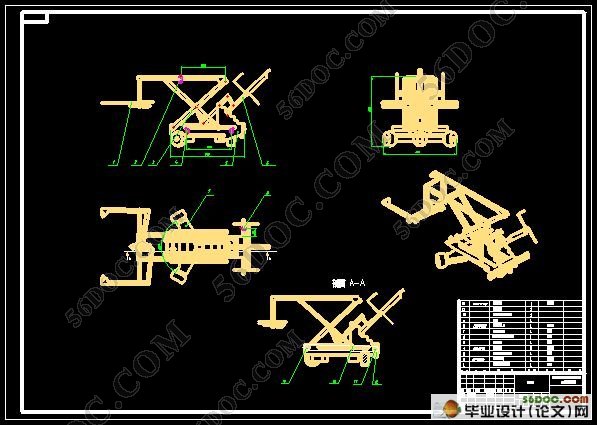
Abstract:Facility transfer robot is designed for ROBOCON2010 robot competition in asia-pacific.The task is mainly to generally optimize the design in aspects of the mechanical structural maturation and the Control system modulation .Linkage mechanism and chain transmission device is used properly for the mechanical structure. On the one hand ,it sovles the operation that a power device drives two manipulator .On the other hand, it can make the robot's center of gravity not produce big migration and result in the robot falling . Because of the laying of the block in the progress of power plant working. The modulation is used in the automatic control aspect .Mainly has the modularized ATmega128 single-chip microcomputer with AVR core control system, for the hollow glass dc reduction motor servo drive system, photoelectric sensors sampling system, robots drive motor (steering gear) control system, placed square and take gold pieces of lifting devices motor drive system etc overall optimization design. The whole system succeed in 2010 Asian and Pacific robot competition domestic trials by high performance-to-price ratio.
Keywords:Robot; Machinery; Control; Hardware; Software