超声波测距在机器人上的应用(包含选题审批表,任务书,开题报告,中期检查报告,毕业论文20000字)
摘 要
本次设计是研究一种基于单片机作为控制系统的机器人超声波测距技术,综合分析系统的组成,软硬件设计,控制原理,实验结果和误差,讨论了超声波测距系统在机器人移动避障中的应用。利用超声波传感器进行信号的发送和接收,经过数据采集分析判断机器人与障碍物的距离,做出避障策略。主要包括3个部分的设计和实现,超声波发送接收器,超声波模块,核心控制模块CPU。超声波模块内置了2个电路,除了电压的增幅和限幅外,还有一个时序电路用于计算当前机器人距离前面障碍物的实时距离。CPU因为考虑实际速度要求最终采用了AVR单片机,虽然花了很长的时间测试不过最后还是很好的同步了CPU和时序电路。后续的数字滤波,实现了程序滤波,中值滤波,数字平均值滤波,滑动平均值滤波,并针对具体情况进行了分析。
关键词:超声波测距,数字滤波,机器人
ABSTRACT
This design is about the robot ultrasonic ranging is researched based on microcomputer as control system. The system formation, software and hardware is analysis, operation principle, experiment result and system error is analyzed. Finally the application of the ranging system to the robot dodge strategy is discussed. This design using ultrasonic sensors for signal send and receive, After data collection and analysis ,judge robot and obstacles to the distance, been strategy, Realize ultrasonic sensors and between serial communication robot. Mainly includes three parts design and implementation, ultrasonic send receiver, ultrasonic module, the core control module CPU. Ultrasonic module built-in 2 circuits, besides voltage amplitude and limiting outside, still a sequential circuit’s current robot used to calculate the real-time distance from front obstacles. Consider the actual speed requirements CPU because eventually adopted AVR microcontroller, although it took a long time test but ultimately very good synchronization CPU and timing circuits. Subsequent digital filter, realized the program filtering, median filtering, digital average filtering, moving average filtering, and in the light of specific conditions were analyzed.
Keywords: ultrasonic ranging,digital filtering, robot
研究思路及方案:
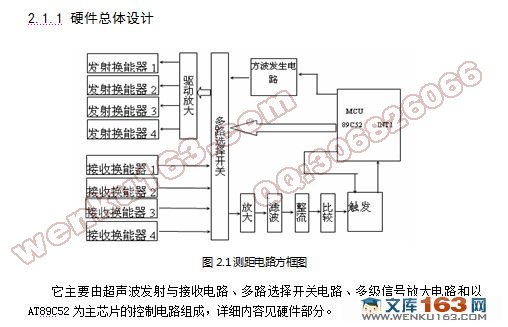
1系统硬件设计:为了能在测量距离的同时判断出物体的大致形状,应设计成多传感器测距系统。经分析可知,频率为40kHz左右的超声波在空气中传播的效率最佳;同时,为了方便处理,发射的超声滤被调制成40kHz左右、具有一定间隔的调制脉冲波信号。测距系统由超声波发送、接收、时间计测、微机控制和温度测量五个部分组成。
1.1 超声波发送
这部分包括超声波信号的产生、多路选择及换能器等环节。
1.2 超声波接收
这部分由接收换能器、多路选择开关、比较及控制等环节组成。由于在距离较远的情况下,声的回波很弱,因而转换为电信号的幅值也较小,为此要求将信号放大60万倍左右。
1.3 时间计测
超过波从发射到接收的间隔时间的测定是由单片机内部的计数器来完成的。
1.4 微机控制部分
由单片机控制的多路选择开在来决定上、中、下三个通道分时工作的顺序。发送通道与接收通道一一对应地接能。
由于受环境温度以及超声固有宽波束角等因素的影响,超声传感器所测量的值与实际值总有一些误差。应尽量减小误差值。
2系统软件设计
2.1 超声数据的采集与处理软件
本系统软件分两部分:主程序和中断服务程序。主程序完成系统初始化、选择能路号、控制发射和接收超声波等。中断服务程序包括内部T0中断和外部INT0、INT1中断服务程序。T0设置为30ms中断一次,其任务就是每隔30ms产生5~8个40kHz的方波作为超声脉冲并按序送到三个通道, INT0中断子程序读取A/D转换结果,并将相应数据值转换为环境温度值;INT1停止T0、T1计数,根据T1内容计算时间T,并进行最终距离的计算。先计算超声波传播速度:C=331.4×(根号1+t/273),再计算距离:D=CT/2,并将计算结果送入缓冲区以备通讯。T1工作在方式2,并设计成门控方式。
2.2 串行通讯程序
为了不影响下拉机完成其他工作,本系统采用下位机以中断的方式向上位机发送测距数据,在测距主程序中开串行口中断。进入中断程序后,仍采用查询方式发送数据。
上位机(PC-586)以子程序的形式给出接收程序。若系统需要新的测距值时,就调用一次接收子程序。接收子程序收到一个数据后,判断数据传输是否有错,若有错就向下位机发“01”命令,下位机收到此命令后,则重表发送;若传输过程无错,向下位机发送“00”命令,下位机则继续发送下一个数据。
目 录
摘 要 I
ABSTRACT II
第1章 绪 论 1
1.1 引言 1
1.1.1 研究背景 1
1.1.2 机器人超声波的研究现状和我们的研究方案 1
1.1.3 具体研究方案 3
第2章 基于CX20106A的超声波模块设计 5
2.1硬件设计的思路和原理 5
2.1.1 硬件总体设计 5
2.1.2 超声波发送电路原理 5
2.1.3 超声波接收电路组成 5
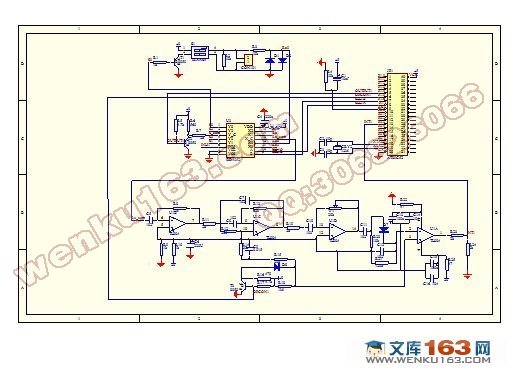
2.2基于CX20106A的硬件设计 7
2.2.1 SONY CX20106A简介 7
2.3基于CX20106A和C51的软件设计 9
第3章 基于AVR MEGA16的超声波驱动设计 18
3.1基于mega16的硬件设计 18
3.1.1 ATMEL AVR mage16简介 18
3.1.2 基于mage16的硬件设计方案 18
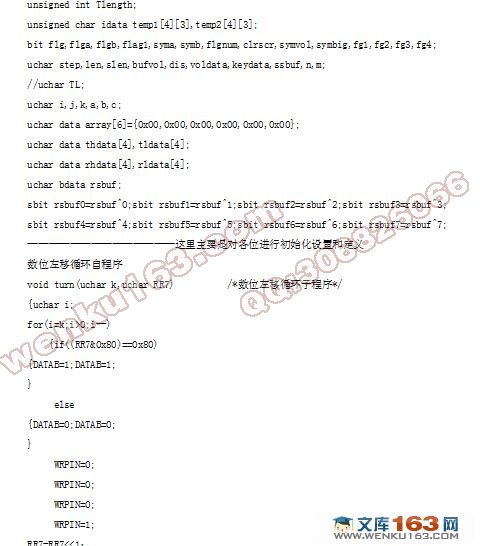
3.1.3 驱动程序设计总体思想 19
3.1.4 数字滤波 22
3.1.5 各种滤波方式的比较 26
3.1.6 软件的实现 27
参考文献 32
附 录 33
致 谢 47
|