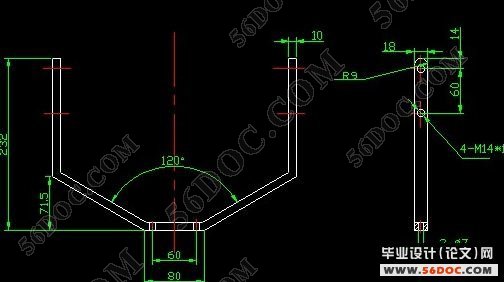
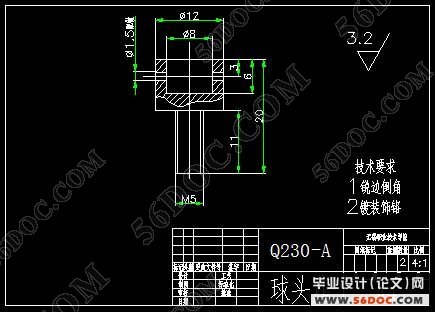
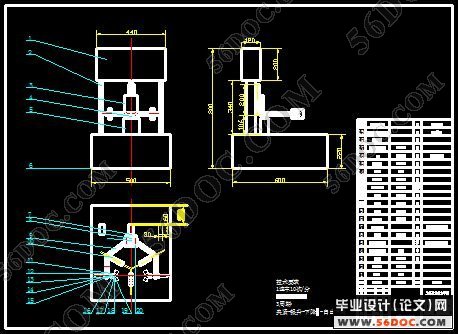
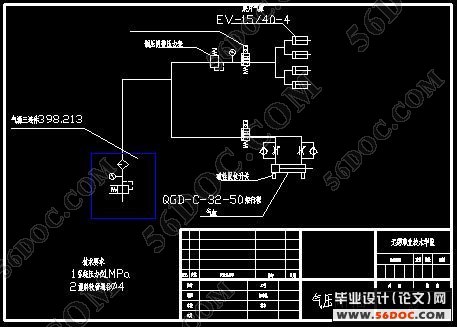
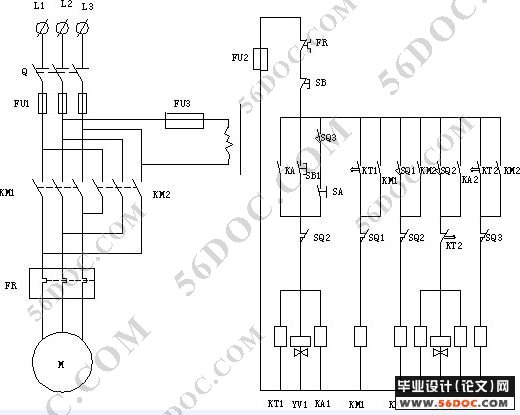
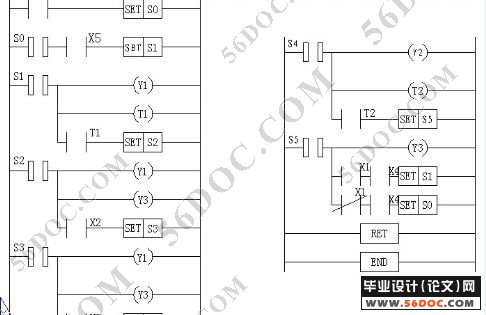
WCB型无绳电水壶耐久插拔实验机设计 来源:wenku163.com 资料编号:WK1633683 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK1633683 我要下载该资源 资料介绍 摘要 随着改革开放的大潮的推动,我国人民生活水平得到了很大的提高,物质生活水平也有了质的飞跃。家用电器大到冰箱、彩电小到电饭煲、电水壶都已经很普及了。现代生活越来越追求简单方便,无绳电水壶的使用也成了必然趋势。提高拉生活水平,人们便会更加注重安全,所以对家用电器的安全会更加注重。 在这次毕业设计中我对WCB型无绳电水壶的安全使用和使用寿命进行了研究。对其壶体与壶座的耐久实验进行了设计。模仿WCB型无绳电水壶在日常生活中使用时的动作设计拉“WCB型无绳电水壶耐久插拔实验机”。 本设计总共包括三大部分:机械结构部分、电气控制与PIC控制部分和气压传动部分。 机械结构部分的设计主要包括对壶体夹持部分,使壶体模仿日常使用时上下移动部分和壶底的固定部分。首先,考虑水壶装满水后总重量约为2KG,壶体本身为硬质材料制成。设计中壶体的夹持部分应该提供一个相应大小的力,即能夹持壶体,带动它一起动作,又不能对壶体表面进行破坏。设计中选用膜片式夹紧气缸来对壶体进行夹紧,由于该夹紧装置在与虎体接触处使用橡胶材料制造,所以对壶体本身就有一定的保护作用。其次,模仿水壶日常使用时的上下移动,假使水壶夹紧后从原位向上提升180mm后开始下降2/3的距离然后放开水壶,让其自由下落与壶底接触。这样就完成了一次模仿水壶日常使用时的动作。让壶体夹紧部分再回到原位后就可以进行下一次的动作。最后是对壶底的固定部分的设计,这一部分的设计主要目的就是固定壶底,使其在壶体的 动作过程中不会移动。壶底一般为圆盘状,所以我着机了Y型夹紧方式,在机器底部设置了三个夹紧用的压板来固定壶底。 电气控制与PLC控制部分的设计只要是针对使壶体模仿日常动作上下移动时的动作流程进行的。夹紧壶体部分通过通过两个电磁阀控制(夹紧电磁阀YV1和松开电磁阀YV2),夹紧壶体上升和下降动作由电动机正反转控制。每分钟循环动作10次,记数1000次。则需要加时间继电器,通过时间继电器延时闭合和延时断开开控制每一循环周期所用的时间;加数字显示器来记数并显示循环次数。本次设计中,机器的动作比较固定,没什么灵活性的动作,是进行比较固定的路线进行工作,由此特性可选用由PLC的步进指令来控制它的动作循序。步进指令又称STL指令,在PLC中还有一条使ST L指令复位的RET指令,利用这两条指令就可以方便的达到对顺序工作的系统控制的功能。由于本设计系统的输入和输出点较少,要求控制的部分体积小,并能够使用计算机对PLC进行监控和管理,故选用日本三菱公司生产的多功能小型FZX-48MR主机,该主机足以满足本次设计中的机器的动作要求。 气压传动部分的设计,在本设计中主要是用于对壶体的夹紧部分。在设计中运用了4个EV-15/40-4型膜片式夹紧气缸对壶体进行夹紧。在这个气动系统中气源装置选用了常见的气源三连件398,213,在线路中加上带压力表的调压阀来调节气缸输出压力的大小。用二位五通电磁阀3K25D-L4AC220V来控制气缸的动作顺序。同时,在本设计中夹紧壶体后的上下移动也可以由气压传动来实现该动作。用带磁性限位开关的短形成气缸QGD-C-32-50来支撑起夹持壶体部分,在气缸的进气口和拍气口加上单向节流阀配合一个 二位五通电磁阀一齐就可以实现夹紧壶体部分的上升和下降动作。 这次设计是机电一体化中典型的“可编程序控制器PLC+气动元件”组成的控制系统,再加上简单的机械类设计。最终达到的目的是模仿WCB型无绳电水壶在日常生活中使用时的动作对其耐久插拔方面进行检验。每分钟动作10次,动作周期:夹紧——上升——下降2/3——松开——下降。记数1000次,最终能检验电水壶在耐久插拔 目录 28000字 机械结构部分 一、设计任务——————————————————————————1 二、动作平台设计————————————————————————1 三、壶体夹持支架设计——————————————————————1 四、可调节壶体夹持部分设计———————————————————2 五、夹持支架上下移动设计————————————————————3 六、壶底固定部分的设计—————————————————————4 电气控制与PLC控制部分 一、 电气控制与PLC简介—————————————————————5 二、 PLC的特点—————————————————————————9 三、 PLC系统组成及各部分的功能—————————————————11 四、 PLC的基本原理———————————————————————13 五、 机器设备的动作顺序—————————————————————13 电气控制图—————————————————————————15 六、 软件设计分析————————————————————————15 1、 软件设计思路分析————————————————————15 2、 电气流程图———————————————————————16 3、 PLC的选用及其I/O点的编号分配—————————————17 4、 PLC流程图———————————————————————17 5、 梯形图—————————————————————————18 6、 指令表—————————————————————————19 七、 调试说明——————————————————————————19 气压传动控制部分 一、 气动简介——————————————————————————20 二、 气压传动的主要优点—————————————————————21 三、 气压传动的主要缺点及其解决方式———————————————22 四、 气源装置——————————————————————————22 五、 气源净化装置————————————————————————22 六、 气动执行元件 气缸—————————————————————23 (一) 气缸的分类——————————————————————23 (二) 气缸的工作特征————————————————————24 七、 气缸的主要设计———————————————————————24 (一) 气缸的主要尺寸设计——————————————————24 (二) 气缸的主要结构设计——————————————————24 结果与讨论——————————————————————————24 参考书目———————————————————————————25 致谢—————————————————————————————33 附录—————————————————————————34 机电一体化产品广泛应用各种加工业,一些简单的机械手已经得到广泛的应用。简单的机械手经过几十年的发展,如今已进入以通用机械手为标志的时代。几十年来,这项技术的研究和发展一直比较活跃,设计在不断的修改,品种也在不断的增加,应用领域也在不断的扩大。简单的机械手是一种仿人操作、自动控制、的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。 这次设计中,机械部分的设计是比较简单的,因为机器设备的材料都是用铝合金和Q235-A制造,材料的硬度和抗疲劳强度都是很不的,而在机器设备工作状态中,各个部件的受力强大都不大,因为WCB型热水壶所有的重量都不会太大,所以机器设备的各个部件受力强度不大,不需要进行对各个部件的材料进行强度、硬度和抗疲劳强度的检验计算。 而在电气控制与PLC控制设计中,首先通过利用各种电气元件相互连接组成电气控制原理图,通过电气控制来控制机器设备所需要的各种动作。用PLC来控制各个动作的先后顺序和单周期动作与自动循环的转换和执行。 在气压传动设计中,主要是对4个膜片式夹紧气缸的设计。设计气缸的内径和外径的大小、设计了气缸进气和排气口的直径大小。 而在这个设计中对壶体夹持部分的上下移动部分的设计有两中方式可以达到同一种效果:一种是通过电气控制中的,夹持支架上下移动由一个正反转电动机对其实现上下移动的拖动;另一种是利用气压传动中的由一个气缸的进气口和排气口加上节流阀再配上一个二位五通的电磁阀来控制夹持支架的上下移动。