基于PLC的五自由度机械手控制(含梯形程序图,结构图)(论文设计说明书21000字,CAD图7张)
本设计的机械手,它共有自由度5个。即:手臂前后伸缩、手臂上下伸缩、手臂左右旋转、手腕回转、手指的抓握。
摘 要
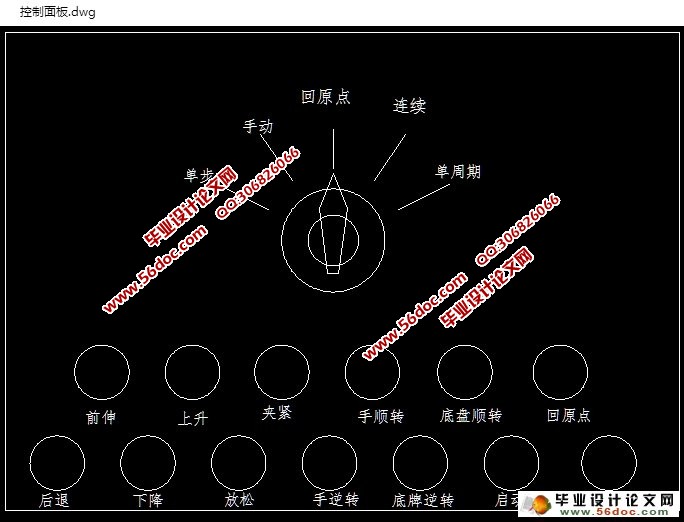
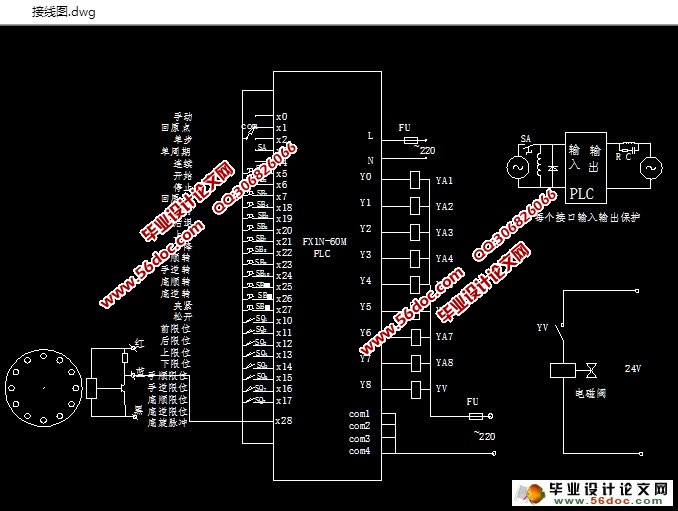
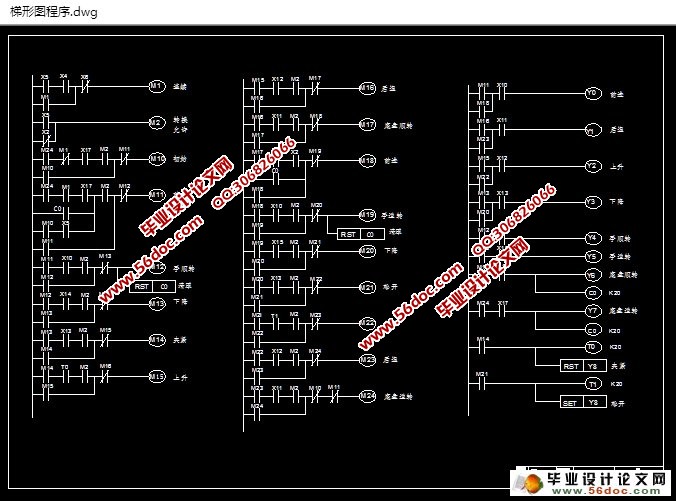
在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。工业机械手就这样诞生了,机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。电气方面有电机、开关电源、电磁阀、等电子器件组成。该装置涵盖了可编程控制技术,位置控制技术、气动技术等,是机电一体化的典型代表仪器之一。本文介绍的机械手是由PLC输出四路来分别驱动横轴、竖轴、底盘转动、手转动电机,控制机械手横轴、竖轴和手爪顺逆旋转的精确定位,微动开关将位置信号传给PLC主机;电机拖动底盘旋转;电磁阀控制气阀的开关来控制机械手手爪的张合,从而实现机械手精确运动的功能。本文设计的工业机械手模型可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。
关键词:可编程控制器PLC,机械手,电机,任意位置
The control of manipulater by PLC
ABSTRACT
In industrial production and other domains, because works need, the people frequently receive factor the and so on high temperature,corrosion and virulent gas harm, increased worker's labor intensity,even endangers life. The industry manipulator like this was born, the manipulator is in theindustry robot assembly system the traditional duty implementingagency, is one of robot key components. The electrical aspect has theelectrical machinery, the switching power supply, the solenoid valve,and so on the electronic device composition. This equipment has covered the programmable control technology, theposition control technology, the air operated technology and so on, isthe integration of machinery model represents one of instruments. Thisarticle introduced the manipulator is outputs four groups by PLCseparately to actuate the abscissa axis, the z-axis, the chassisrotation, hand turns an electric motor, controls the manipulatorabscissa axis and the z-axis pintpointing, the microswitch bequeathsthe position signal the PLC main engine; The electrical machinerydrives the hand fingernail and the chassis revolves; The solenoidvalve controls the air valve the switch to control the manipulatorhand fingernail to gather, thus realizes the manipulator proper motionfunction. This topic plans the industry manipulator model which develops to bepossible in the space to grasp puts the object nimbly, the movement isdiverse, may replace artificially carries on the work in hightemperature and the dangerous operation area, and may changes therelated parameter as necessary according to the work piece change and the movement flow request.
KEY WORDS: Programmable controller PLC, manipulator,electrical machinery, freeposition
目 录
前 言 1
第1章 机械手各功能实现形式与控制方式 2
1.1机械手概述 2
1.1.1机械手的定义与发展 2
1.1.2机械手分类及控制方法 3
1.1.3机械手的结构原理 3
1.2本机械手模型的机能和特性 5
1.3夹紧机构 5
1.4躯干 6
1.5设计要求 6
1.5.1控制方式及要求 7
1.6旋转编码盘 9
第2章 控制系统硬件设计 10
2.1 PLC的定义及特点 10
2.2 PLC的选型 12
2.2.1常用PLC介绍 12
2.2.2常用PLC介绍 14
2.2.3确定型号FX1N-60MR 16
2.2.4 FX1N所具有优越性能 17
2.2.5 FX系列PLC型号的说明 17
2.3三菱FX系列的结构功能 18
2.3.1 PLC内部功能 19
2.3.2 PLC输入输出接口的安全保护 20
2.4 FX1N PLC梯形图中的编程元件 21
第3章 软件设计 23
3.1程序的总体结构 23
3.2各部分程序如下 24
结 论 33
谢 辞 34
参考文献 35
附 录 37
外文资料翻译 45
|
