Μυ”ΎPLC»ΐΉ‘”…Ε»Μζ–Β ÷ΒΡ…ηΦΤ(–¬ΤΖ)
ά¥‘¥ΘΚwenku163.com Ή Νœ±ύΚ≈ΘΚWK1633818 Ή ΝœΒ»ΦΕΘΚΓοΓοΓοΓοΓο %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK1633818
Ή ΝœΫι…ή
’Σ“Σ
Μζ–Β ÷‘ΎΉ‘Ε·Μ·Νλ”ρΒΡ”Π”Ο‘Ϋά¥‘ΫΙψΖΚΘ§”κΤδΥϊάύ–ΆΒΡΜζ–Β ÷œύ±»Θ§ΨΏ”–ΫαΙΙΦρΒΞΓΔ‘λΦέΫœΒΆΓΔΈ§ΜΛΖΫ±ψΓΔΥΌΕ»ΩλΒ»ΧΊΒψΓΘΥϋΡήΡΘΖ¬»Υ ÷ΚΆ±έΒΡΡ≥–©Ε·ΉςΙΠΡήΘ§”Ο“‘Α¥ΙΧΕ®≥Χ–ρΉΞ»ΓΓΔΑα‘ΥΈοΦΰΜρ≤ΌΉςΙΛΨΏΒΡΉ‘Ε·≤ΌΉςΉΑ÷ΟΓΘΥϋΩ…¥ζΧφ»ΥΒΡΖ±÷ΊάΆΕ·“‘ Βœ÷…ζ≤ζΒΡΜζ–ΒΜ·ΚΆΉ‘Ε·Μ·Θ§Ρή‘Ύ”–ΚΠΜΖΨ≥œ¬≤ΌΉς,“‘±ΘΜΛ»Υ…μΑ≤»ΪΘ§“ρΕχΙψΖΚ”Π”Ο”ΎΜζ–Β÷Τ‘λΓΔ“±ΫπΓΔΒγΉ”ΓΔ«αΙΛΚΆ‘≠Ή”ΡήΒ»≤ΩΟ≈ΓΘ¬έΈΡΨΆ «Ά®Ιΐ”Π”ΟΈςΟ≈Ή”S7-200œΒΝ–PLCΆ®Ιΐ±ύ≥Χά¥ΩΊ÷ΤΤχΕ·Μζ–Β ÷‘Υ––ΒΡΓΘΕ‘Μζ–Β ÷ΒΡΖΔ’ΙΦΑ”Π”ΟΉωΝΥΦρ“ΣΫι…ήΘ§≤ΔœξœΗΫι…ήΝΥœΒΆ≥ΒΡΫαΙΙΓΔΙΛΉς‘≠άμΓΔ≤ΫΫχΒγΜζΩΊ÷ΤΚΆ»μΦΰ Βœ÷ΓΘ
‘ΎΩΦ≤λœύΙΊ ΒΈοΦΑΉ ΝœΒΡΜυ¥Γ…œΘ§Έ“≤ΜΫωΧαΗΏΝΥΉ‘ΦΚΒΡ―ßœΑΡήΝΠΕχ«“ΧαΗΏΝΥΙΛΉςΡήΝΠΓΘ
ΙΊΦϋ¥ ΘΚ Μζ–Β ÷, PLC ,ΉιΧ§»μΦΰ
ABSTRACT
The manipulator is used more and more widely in automatic filed. The pneumatic manipulator has the virtues such as simpleness, cheapness, the convenience of maintenance, high speed and so on compared with other manipulators. The project is through applies Siemens S7-200 the series PLC control pneumatic motor manipulator the movement. The development and application of manipulator is briefly introduced in the paper. The system component, the work principle, how to control stepper motor and how to programmable are also introduced in detail. This paper covers the development principle and method of PLC-based real-time monitoring program for automated manipulator mode.
Key words: Manipulator, PLC, Configuration software.
±ΨΩΈΧβΒΡ÷ς“Σ»ΈΈώ
±ΨΩΈΧβΒΡ÷ς“Σ»ΈΈώ «άϊ”Οœ÷”–Μζ–Β ÷ΫΧ―ß ΒΈοΡΘ–ΆΘ§Ά®ΙΐPLC±ύ≥ΧΩΊ÷ΤΜζ–Β ÷ Βœ÷“‘œ¬ΒΡΕ·ΉςΙΐ≥ΧΘΚΘ®1Θ©Κα÷α«Α…ΐΘΜΘ®2Θ© ÷–ΐΉΣΒΫΈΜΘΜΘ®3Θ©Βγ¥≈ΖßΕ·ΉςΘ§ ÷’≈ΩΣΘΜΘ®4Θ© ζ÷αœ¬ΫΒΘΜΘ®5Θ©Βγ¥≈ΖßΗ¥ΈΜΘ§ ÷Φ–ΫτΘΜΘ®6Θ© ζ÷α…œ…ΐΘΜΘ®7Θ©Κα÷αΥθΜΊΘΜΘ®8Θ©ΒΉ≈Χ–ΐΉΣΒΫΈΜΘΜΘ®9Θ©Κα÷α«Α…ΐΘΜΘ®10Θ© ÷–ΐΉΣΘΜΘ®11Θ© ζ÷αœ¬ΫΒΘΜΘ®12Θ©Βγ¥≈ΖßΕ·ΉςΘ§ ÷’≈ΩΣΘΜΘ®13Θ© ζ÷α…œ…ΐΗ¥ΈΜΓΘ

ΡΩ ¬Φ 21000Ή÷
’Σ“Σ III
ABSTRACT IV
ΒΎ“Μ’¬ –ς ¬έ - 1 -
1.1±ΨΩΈΧβ―–ΨΩΒΡΡΩΒΡ”κ“β“ε - 1 -
1.2±ΨΩΈΧβΒΡ÷ς“Σ»ΈΈώ - 1 -
ΒΎΕΰ’¬ Μζ–Β ÷Η≈ ω - 2 -
2.1Μζ–Β ÷ΒΡΦρΫι - 2 -
2.1.1 Μζ–Β ÷ - 2 -
2.1.2 Μζ–Β ÷ΒΡΖ÷άύ - 2 -
2.2Μζ–Β ÷ΒΡΖΔ’Ι - 3 -
2.2.1 ΤχΕ·ΦΦ θΦΑΤχΕ·Μζ–Β ÷ΒΡΖΔ’ΙΙΐ≥Χ - 3 -
2.2.2 ΤχΕ·Μζ–Β ÷ΒΡ”Π”Οœ÷Ή¥ - 4 -
2.2.3 ΖΔ’Ι«ΑΨΑΦΑΖΫœρ - 5 -
ΒΎ»ΐ’¬ Ω…±ύ≥Χ–ρΩΊ÷ΤΤς - 7 -
3.1 Η≈ ω - 7 -
3.1.1 Ω…±ύ≥Χ–ρΩΊ÷ΤΤςΒΡ≤ζ…ζΦΑΕ®“ε - 7 -
3.1.2Ω…±ύ≥Χ–ρΩΊ÷ΤΤςΒΡΙΠΡή - 7 -
3.1.3 Ω…±ύ≥Χ–ρΩΊ÷ΤΤςΒΡΧΊΒψ - 8 -
3.1.4 Ω…±ύ≥Χ–ρΩΊ÷ΤΤςΒΡΖ÷άύ - 8 -
3.2 Ω…±ύ≥Χ–ρΩΊ÷ΤΤςΒΡΜυ±ΨΉι≥… - 9 -
3.2.1 Ω…±ύ≥Χ–ρΩΊ÷ΤΤςΒΡΉι≥… - 9 -
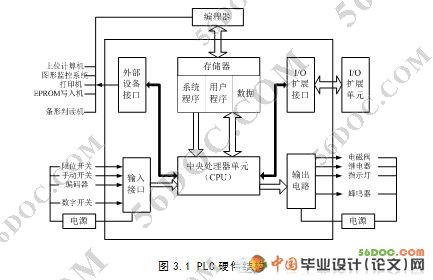
3.2.2 PLCœΒΆ≥ΒΡΒ»–ßΒγ¬Ζ - 11 -
3.3 Ω…±ύ≥ΧΩΊ÷ΤΤςΒΡΙΛΉς‘≠άμ - 12 -
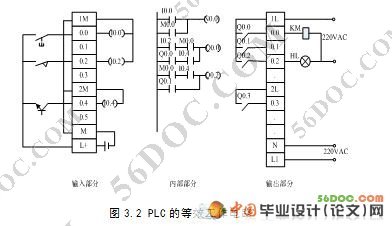
3.3.1 PLCΒΡΙΛΉς‘≠άμ - 12 -
3.3.2 PLCΕ‘ δ»κ/ δ≥ωΒΡ¥Πάμ‘≠άμ - 13 -
3.3.3 PLCΒΡ±ύ≥Χ”ο―‘ - 13 -
ΒΎΥΡ’¬ Μζ–Β ÷ΩΊ÷ΤœΒΆ≥…ηΦΤ - 16 -
4.1œΒΆ≥”≤ΦΰΗ≈ ω - 16 -
4.1.1 Μζ–Β ÷ΒΡΜυ±ΨΫαΙΙ - 16 -
4.1.2Μζ–Β ÷ΒΡ”≤ΦΰΦρΫι - 16 -
4.2œΒΆ≥»μΦΰ…ηΦΤ - 20 -
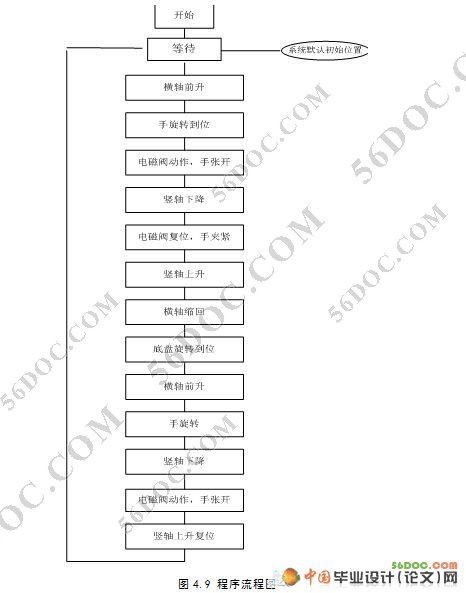
4.2.1Μζ–Β ÷ΩΊ÷Τ“Σ«σ - 20 -
4.2.2 PLCΒΡI/OΫ”œΏΆΦΦΑΤδΒΊ÷ΖΖ÷≈δ - 20 -
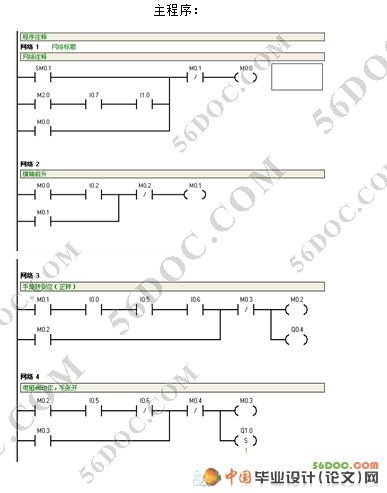
4.2.3 PLCΒΡ≥Χ–ρ…ηΦΤ - 21 -
ΉήΫα - 26 -
≤ΈΩΦΈΡœΉ - 27 -
÷¬–Μ - 28 -
ΗΫ¬Φ1 ≥Χ–ρœξΒΞ - 29 -
|
