PLCПижЦЕФвЦжУЛњаЕЪжЕФЩшМЦ(ИНcadЭМжН)(КЌбЁЬтЩѓХњБэ,ШЮЮёЪщ,ПЊЬтБЈИц,жаЦкМьВщБэ,БЯвЕТлЮФ18000зж,cadЭМжН10еХКЯвЛ)
еЊ вЊЃКЛњаЕЪжЪЧдкЛњаЕЛЏЁЂздЖЏЛЏЙ§ГЬжаЗЂеЙЦ№РДЕФвЛжжаТаЭзАжУЁЃЫќФмФЃЗТШЫЪжВПЗжЖЏзїЃЌАДеедЄЯШЩшЖЈЕФГЬађЃЌЙьМЃЛђЦфЫћвЊЧѓЃЌЪЕЯжзЅШЁЃЌАсдЫЙЄМўЛђВйзнЙЄОп ЕФЛњаЕЛЏзАжУЁЃдкЯжДњЩњВњжаЃЌЛњаЕЪжБЛЙуЗКгІгУгкздЖЏЩњВњЯпЃЌЛњЦїШЫЕФбаОПКЭЩњВњвбОГЩЮЊИпПЦММСьгђФкЃЌбИЫйЗЂеЙЦ№РДЕФвЛУХаТаЫЕФММЪѕЃЌЫќДйНјСЫЛњаЕЪжЕФ ЗЂеЙЃЌЪЙЕУЛњаЕЪжФмИќКУЕФгыЛњаЕЛЏЁЂздЖЏЛЏгаЛњНсКЯЁЃ
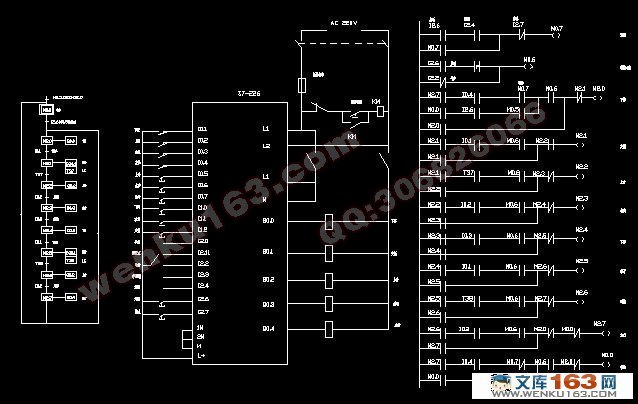
БОЮФЕФвЦжУЛњаЕЪжЕФЩшМЦЃЌВЩШЁжБНЧзјБъЪНдЫЖЏаЮЪНЕФЛњаЕЪжЃЌвКбЙЧ§ЖЏЕФЗНЪНЃЌЭЈЙ§вКбЙИзЃЌЗЇЃЌгЭБУЃЌгЭЯфЕШЪЕЯждЫЖЏЁЃЭЌЪБВЩгУPLCПижЦЕчДХЛЛЯђЗЇЃЌПижЦгЭИзЕФНјгЭЃЌДгЖјПижЦЛњаЕЪжЕФжБЯпвЦжУдЫЖЏЃЌНјЖјЪЕЯжЦфздЖЏЛЏЃЌОпгаЬсИпЩњВњаЇТЪЃЌЪЕЯжЪЕЪБПижЦЕФвтвхЁЃ
ЙиМќДЪЃКЛњаЕЪжЃЛPLCЃЛвКбЙИзЃЛЕчДХЛЛЯђЗЇ
The Design of Robot displacement Manipulator Based on PLC Control
Abstract: Manipulator is one kind of new model device automating to develop in process in mechanization.It can imitate humen’s hand action. According to the predetermined programme, track and other requirements. Realize grabing carrying workpieces and operating tools by a Mechanization device. In the production of now, manipulators are widely used in automatic production line. Robot in the research and production has become a new developing rapidly technology in a high-tech area. It has promoted the development of manipulator .Especially,making manipulator can better implementation and mechanization, automation organic integration.
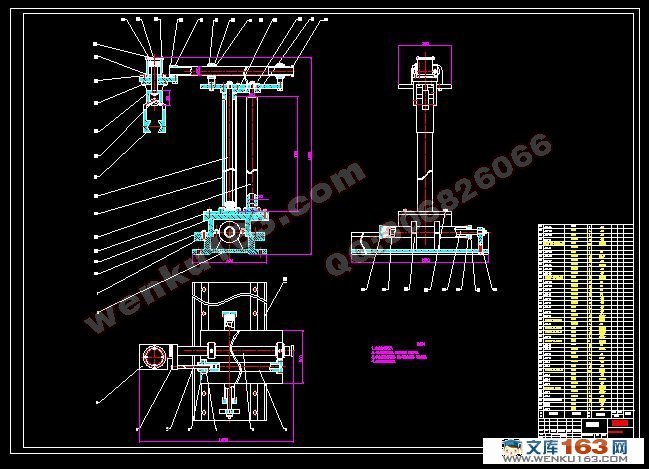
The writing of moving manipulator design,Adopt dyadic motion of right angle coordinate form manipulator, way that hydraulic pressure drives, by the hydraulic cylinder , valve , oil pump,the fuel tank and so on to realizing motion. at the same time ,Adopt PLC to control electromagnetism changing-over valve. controlling oil moving forward to oil jar, So as to control of the manipulator linear movement of sports, and achieve its automation, With increasing production efficiency, realizing the significance of the real-time control.
Key words: ManipulatorЃЛPLCЃЛHydraulic cylinderЃЛElectromagnetism changing-over valve
ФП ТМ
еЊ вЊ 1
ЙиМќДЪ 1
1 ЧАбд 2
1.1 бЁЬтбаОПвтвх 2
1.2 PLCЦ№дД 2
1.3 PLCЕФЗЂеЙ 3
1.4 PLCЙЄзїдРэ 3
1.5 PLCЙІФмЬиЕу 4
2 PLCЕФНсЙЙМАЛљБОХфжУ 5
2.1 PLCЕФCPUЕФЕиЮЛ 5
2.2 PLCЕФCPUЙІФм 5
2.3 PLCЕФДцДЂЦї 6
2.4 PLC ЕФЭтВПЩшБИ 7
2.5 PLCЕФбЁаЭ 7
2.6 PLCЕФЙЄзїЙ§ГЬ 8
3 ЛњаЕЪжЗЂеЙИХПі 10
3.1 ЛњаЕЪжЙњФкЗЂеЙЯжзД 11
3.2 ЛњаЕЪжЕФЙњЭтЗЂеЙЯжзД 11
3.3 ИїРрЛњаЕЪжЕФБШНЯ 12
4 змЬхЗНАИЕФЩшМЦгыЗжЮі 14
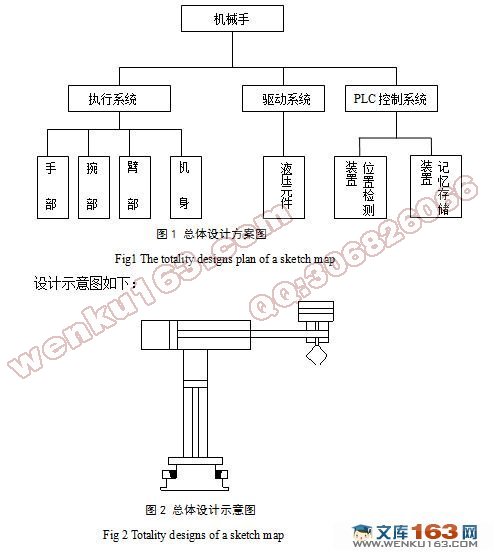
4.1 ЛњаЕЪжЩшМЦЕФзмЬхЗНАИ 14
4.2 ЪжжИЕФМаНєСІЕФМЦЫу 15
4.3 ЪжБлНсЙЙЩшМЦ 15
5 вКбЙИзжївЊВЮЪ§ЕФШЗЖЈ 15
5.1 МаНєИзМаНєСІЕФМЦЫу 15
5.2 XЗНЯђвЦЖЏЕФЪмСІМЦЫу 16
5.3 ZЯђвЦЖЏЕФЪмСІМЦЫу 16
5.4 YЗНЯђвЦЖЏЕФЪмСІМЦЫу 17
6 вКбЙЯЕЭГжївЊВЮЪ§МЦЫу 17
6.1 бЁдёЯЕЭГЕФЙЄзїбЙСІ 17
6.2 ШЗЖЈжДаадЊМўЕФМИКЮВЮЪ§ 17
6.2.1 ШЗЖЈМаНєИзЛњЙЙГпДч 18
6.2.2 XЗНЯђвЦЖЏИзНсЙЙГпДч 18
6.2.3 YЗНЯђКсвЦИзЛњЙЙГпДчМЦЫу 18
6.2.4 ZЗНЯђЩ§НЕИзЛњЙЙГпДчМЦЫу 18
7 ФтЖЈвКбЙЯЕЭГдРэЭМ 19
7.1 ЯЕЭГдЫЖЏЛиТЗЕФЩшМЦ 19
7.1.1 XЗНЯђдЫЖЏЛиТЗЕФЩшМЦ 19
7.1.2 YЗНЯђдЫЖЏЛиТЗЕФЩшМЦ 19
7.1.3 ZЗНЯђЩ§НЕдЫЖЏЛиТЗЕФЩшМЦ 20
7.1.4 МаНєИзЖЏзїЛиТЗЕФЩшМЦ 20
7.2 ФтЖЈвКбЙЯЕЭГдРэЭМ 20
8 вКбЙдЊМўЕФбЁдё 21
8.1 бЁдёвКбЙБУ 21
8.1.1 ШЗЖЈвКбЙБУЕФзюДѓЙЄзїбЙСІ 21
8.1.2 ШЗЖЈвКбЙБУЕФСїСП 22
8.2 ШЗЖЈвКбЙБУЧ§ЖЏЕчЛњЙІТЪ 22
8.3 бЁдёИЈжњдЊМў 22
8.4 ШЗЖЈгЭЯфЕФШнСП 23
8.5 вКбЙЗЇЕФбЁдё 23
9 вКбЙЯЕЭГЕФадФмбщЫу 24
9.1 ЛигЭТЗбЙСІЫ№ЪЇЕФбщЫуЃК 24
9.2 ОжВПбЙСІЫ№ЪЇбщЫуЃК 24
9.3 МЦЫувКбЙЯЕЭГЕФЗЂШШЮТЩ§ 25
9.4 живЊСЌНгВПЮЛТнЖЄЧПЖШЕФаЃКЫ 26
10 PLCПижЦЯЕЭГЕФЩшМЦ 27
10.1 ЩшМЦИУЛњаЕЪжПижЦГЬађЕФВНжшКЭЗНЗЈ 27
10.2 PLCЛњаЕЪжПижЦГЬађЩшМЦ 28
10.2.1 ЛњаЕЪжПижЦЕФЙЋгУГЬађ 30
10.2.2 ЪжЖЏГЬађ 31
10.2.3 здЖЏГЬађ 32
10.2.4 здЖЏЛидЕуГЬађ 33
11 НсТл 34
ВЮПМЮФЯз 34
жТаЛ 35
ИНТМ 35
ИНТМ
ИНТМ1ЃКЙЋгУГЬађДњТы
ИНТМ2ЃКЪжЖЏГЬађДњТы
ИНТМ3ЃКздЖЏГЬађДњТы
|