基于PLC控制的通用翻转机械手的设计
来源:wenku163.com 资料编号:WK1639275 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK1639275
资料介绍
基于PLC控制的通用翻转机械手的设计(说明书13000字,CAD图纸4张)
摘 要:在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,工业机器手主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取程序自动控制。本文将设计一台四自由度的工业机器手,用于翻转物料。本文将设计机器人的底座、大臂、小臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭建机器手的结构平台,在此基础上,本文将设计该机器手的控制系统以及控制软件的设计,重点加强控制软件的可靠性和机器手运行过程的安全性。
关键词:机器人;PLC编程;伺服;制动;
Design of General Manipulator Based on PLC
Abstract: In the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality. As an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, industrial robots mainly undertake the jops of welding, spraying, transporting and stowing etc. , which are usually done repeatedly and take high work strength, and most of these robots work in auto control by program. In this paper I will design an industrial robot with four DOFs, which is used to turn over material. It will design the structure of the base, the big arm, the small arm and the end manipulator of the robot, then choose proper drive method and transmission method, building the mechanical structure of the robot. On this foundation, It will design the control system of the robot and control software. Great attention will be paid on the reliability of the control software and the robot safety during running.
Key words: robot;PLC;servocontrol;brake;
机械手设计要求
要求本设计能鲜明体现设计构思,并在规定的时间内完成以下工作:
1) 拟定机械手的整体设计方案,特别是机械手各主要组成部分的方案。
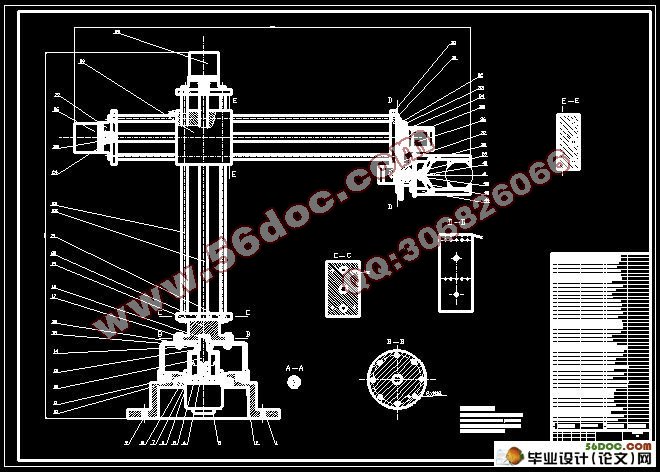
2) 根据给定的自由度和技术参数选择合适的手部、腕部、臂部和机身的结构。
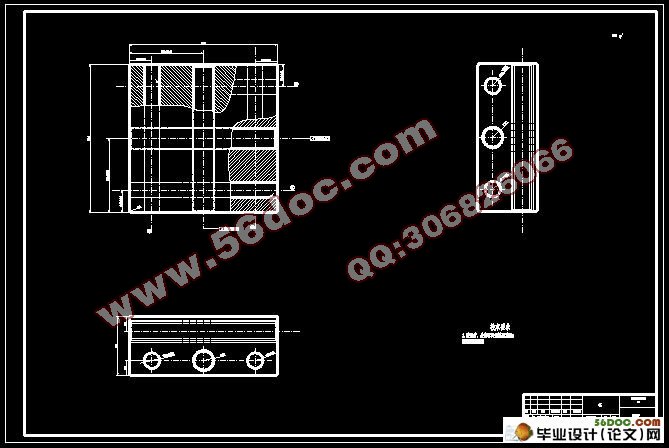
3) 各主要部件(手部、腕部、臂部)的设计计算。
4) 工业机械手装配图的绘制。
5) 编写设计计算说明书。
6) 编写相关PLC程序。
目 录
摘要 1
关键词 1
1前言 2
2机器手设计要求 2
3机械手总体设计方案 2
3.1机械手的组成 2
3.1.1执行机构 2
3.1.2驱动机构 3
3.1.3控制机构 3
3.2机械手在生产中的作用 3
3.3机械手的主要特点 3
3.4机械手的技术发展方向 4
3.5机械手坐标形式与自由度的选择 5
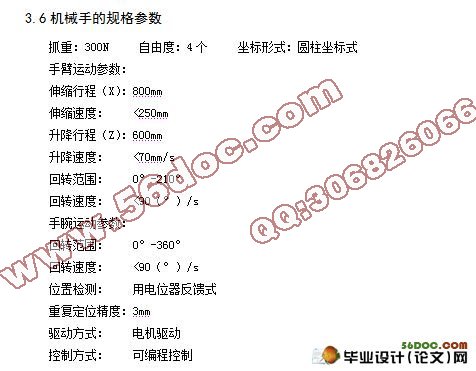
3.6机械手的规格参数 5
3.7机械手手部设计计算 6
3.7.1手部设计基本要求 6
3.7.2手部力学分析 6
3.7.3夹紧力与驱动力的计算 7
3.7.4手抓夹持范围计算 9
3.7.5手抓加持精度的分析计算 9
3.8机械手腕部设计计算 9
3.8.1腕部设计的基本要求 9
3.8.2腕部的结构选择 10
3.8.3腕部回转力矩计算 10
3.9机械手臂部设计计算 12
3.9.1臂部设计的基本要求 12
3.9.2臂部的机构选择 12
3.9.3大手臂的选择 12
3.10机身升降机构计算 13
3.10.1手臂偏重力矩的计算 13
3.10.2升降导向立柱不自锁条件 13
3.11驱动方式 14
3.12传动方式 16
3.13制动器 16
4控制系统硬件 17
4.1控制系统模式的选择 17
4.2控制系统的搭建 18
4.2.1工控机 18
4.2.2PLC控制器 19
4.2.3伺服放大器 19
4.2.4电源 20
5控制系统软件 20
5.1预期的功能 20
5.2实现方法 21
5.2.1直流电机的伺服控制 21
5.2.2电机的自锁 21
5.3编写PLC程序 22
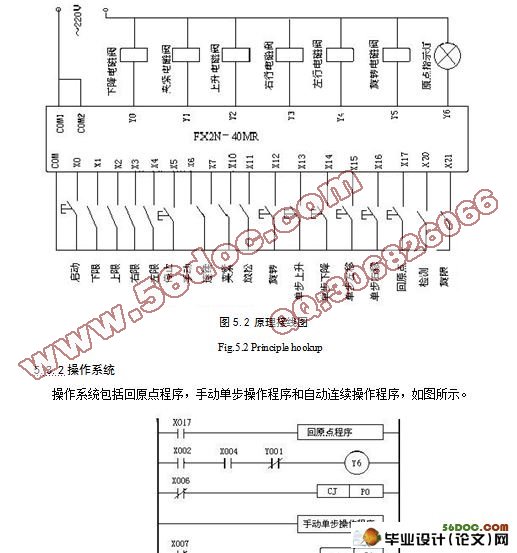
5.3.1输入和输出点分配表及原理接线图 22
5.3.2操作系统 23
5.3.3回原位程序 24
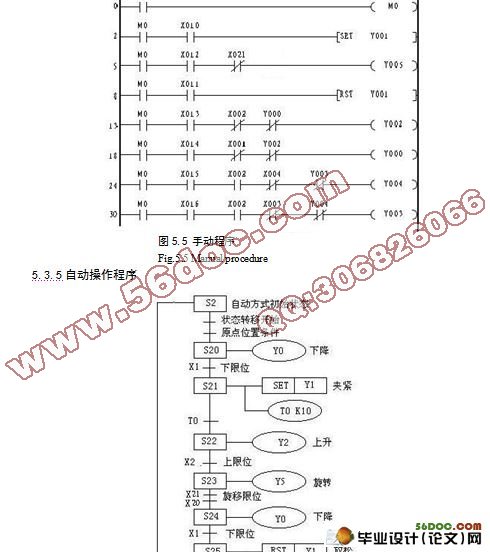
5.3.4手动单步操作程序 24
5.3.5自动操作程序 25
5.3.6机械手传送系统梯形图 26
5.3.7指令语句表 28
6结论 29
6.1所完成的工作 29
6.2设计经验 29
6.3误差分析 29
6.4可以继续探索的方向 30
参考文献 31
致谢 31
|
