柑橘图像中成熟柑橘的定位设计与实现(附答辩记录)(包含选题审批表,任务书,开题报告,中期报告,毕业论文10300字,源代码)
摘 要:在现代化农业发达的城市,对农业进行方便、高效的管理也变得尤为重要,而果蔬图像识别系统在农业的智能监视和管理中发挥着重要作用,基于此的研究也成为了一个热点。本文首先介绍果蔬图像定位技术的发展现状、基本流程和发展趋势;然后详细地介绍柑橘图像定位过程中彩色图像灰度化、灰度图像二值化和边缘提取算法原理,并重点介绍边缘提取的sobel算子、canny算子、prewit算子的实现算法;最后以柑橘图像为实验对象,在彩色图像灰度化等基础上,使用sobel算子实现柑橘图像中柑橘的边缘提取,以实现对柑橘图像中柑橘的定位。
关键词:图像识别;图像定位;Hough变换
Citrus Image Mature Citrus Positioning Design and Implementation
Abstract: In the developed cities of the modern agriculture, Convenient, and efficient management has become particularly important for agriculture, while Fruit and vegetable pattern recognition systems play an important role in the intelligent monitoring and management of agriculture, the relative research has also become a hot spot. This paper first introduces the current development of the fruits and vegetables image positioning technology, the basic process, and development trends; Detailed description of the Citrus image positioning process color image gray, gray image binarization and edge detection algorithm principle, And highlight the edge detection sobel operator, canny operator, prewit operator algorithm; Finally, the image of citrus as experimental subjects, In order to achieve the positioning of citrus in the citrus image., Using sobel Operator to extract the citrus image edge on the basis of the color image gray.
Key words: image recognition; image positioning; Hough transform
研究方案(研究目的、内容、方法、预期成果、条件保障等)(宋体五号,行间距单倍行距)
(1)研究目的:
本文主要针对果实采摘机器人研究中的核心部分果实识别视觉系统的计算机图像处理方法进行研究。此次研究以柑橘作为研究对象,对实际环境中生长的成熟柑橘进行图像采集,基于MATLAB7.1平台编写程序进行图像处理,并运用相关图像处理算法进行分析计算,来识别果实。
(2)研究内容:
本文首先介绍果蔬图像定位技术的发展现状、基本流程和发展趋势;然后详细地介绍柑橘图像定位过程中彩色图像灰度化、灰度图像二值化和边缘提取算法原理,并重点介绍边缘提取的sobel算子、canny算子、prewit算子的实现算法;最后以柑橘图像为实验对象,在彩色图像灰度化等基础上,使用sobel算子实现柑橘图像中柑橘的边缘提取,以实现对柑橘图像中柑橘的定位。
(3)研究方法:
论文主要是通过对彩色图像的灰度化、二值化、Sobel边缘检测、HoughD的园定位来实现对柑橘图像中成熟柑橘的定位与实现。
(4)预期结果:能够实现柑橘图像中成熟柑橘的定位,所得到的图像应该是黑色底有成圆形白圈的图像。
(5)条件保障:
条件保障:为了能够实现预期的成果,我设计了柑橘图像中成熟柑橘的定位于实现,通过利用MATALAB软件平台,采用了Sobel边缘检测与Hough园检测法相结合的算法,在设计实验的过程中,经过自己不断的测试调控,完成预期成果。其次在本专业课程中因为开过这MATALAB门课,所以在此方面还是有些基础认识,外加班上同学也有做车牌相关的设计,我们可以互相探讨,相互帮助,实在不行,还可以咨询老师,所以经过努力,我认为我是可以完成这些功能并从中学习到很多知识的。
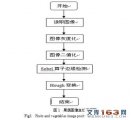
2.2 果蔬图像定位基本流程
对图像进行灰度化、二值化、边缘检测,hough变换等过程将图片中柑橘轮廓检测了出来如图1所示。
2.3 果蔬图像定位发展趋势
随着科技和经济的发展,水果收获机器人必将得到越来越广泛的应用,在未来的农业生产中发挥重要作用。果蔬图像定位发展应从以下几个方面发展:
(1)结构简单、价格合理、用途广泛。为了使农业生产中目前尚难以使用机械的领域也实现机械化、自动化,机器人不能简单的模仿人的动作,而要用机器人易于实现的动作代替人的动作。为了配合机器人的工作,也应通过生物工程等方法,改变生物的形态或开发新品种,使之尽量均一化、规格化。这样可防止机器人机构过于复杂,使其价格合情合理,便于推广[4]。由于作业对象的多样性,机器人应该做到更换机械手的终端执行器和软件就可移做它用,做到一机多用,以提高使用效率,降低使用成本。

目 录
摘要 1
关键词 1
1 前言 2
2 果蔬图像定位概述 2
2.1 果蔬图像定位现状 2
2.2 果蔬图像定位基本流程 3
2.3 果蔬图像图像定位发展趋势 3
3 柑橘图像定位原理 4
3.1 柑橘图像灰度化 4
3.2 灰度图像二值化 5
3.3 边缘提取算法 6
4 柑橘图像定位算法实现 8
4.1 柑橘图像定位实现过程 8
4.1.1 图像读取 8
4.1.2 图像灰度 8
4.1.3 图像二值化 9
4.1.4 边缘检测 9
4.1.5 柑橘定位与实现 10
4.2 柑橘图像定位源代码 11
4.3 柑橘图像定位算法实现 14
4.3.1 实验结果 14
4.3.2 结果分析 15
5 结束语 16
参考文献 16
致谢 17
|