基于单片机的灭火机器人控制系统设计与实现(附电路图,程序)(论文11900字)
摘 要
随着科技的发展,机器人已开始进入人们的生活中,并发挥了重大作用,在不久的将来更多的机器人将会在人类生活中出现。为了推动机器人研究的发展,出现了各种机器人比赛,灭火机器人比赛就是其中之一。本文首先对机器人技术的研究背景和意义、研究现状和存在的挑战、存在的问题等进行全面的叙述。然后针对灭火机器人的硬件条件和灭火比赛的具体功能要求,进行了智能灭火机器人优化技术的研究和实现。
在硬件方面,对灭火机器人改进主要集中在声音传感器、避障传感器、红外传感器和灰度传感器等传感器上。针对这些传感器在灭火工作中的作用原理和实际使用环境中进行分析,从而做到对各传感器的精确控制。这方面工作主要是对这些传感器在实际环境中的参数测试和优化。
在软件设计方面的工作,主要是火源搜索策略和回家策略的设计及其程序实现。火源搜索策略用来保证灭火机器人以最快的速度寻找到火源,回家策略是在机器人完成灭火后,最快的速度返回出发点。程序实现主要包括启动模块、搜索火源模块、灭火模块、回家模块。
本文主要研究灭火机器人的智能优化技术,从提高机器人出发的灵敏性,搜索火源的快速性,火源定位的准确性,以及整机运行的稳定性入手,以全局优化的策略来对机器人火源搜索策略进行优化,改进了回家策略。最后,在实现了以上策略和对各类传感器参数的细致调整后,在标准比赛场地中进行机器人灭火实验,并和其他灭火策略进行对比,验证了本文设计的优化策略的实用性和参数调整的有效性。
关键词:灭火机器人 智能优化 搜索策略 传感器
ABSTRACT
With the development of science and technology, robotics has begun to enter people's lives, and played a major role in the near future, more robots will be in human life. In order to promote the development of robotics research, there has been a variety of robot competitions, fire-fighting robot competition is one of them. Firstly, the research background and significance of the robot technology, research status and the challenges, problems, etc. to conduct a comprehensive description. Requirements or the specific functions of the fire-fighting robot hardware conditions and fire-fighting game, smart fire-fighting robot to optimize technology and achieve.
The hardware side, the fire fighting robot improvement is mainly concentrated in the acoustic sensors, obstacle avoidance sensors, infrared sensors and gray scale sensors and other sensors. For these sensors mouth obvious role in extinguishing the principles and practical use of the environment analysis, in order to achieve precise control of each sensor. The work in this area is the main parameter testing and optimization of these sensors in a real environment.
In software design aspects of the work, the search strategy of the fire source and home policy design and program implementation. The fire source search strategy used to ensure the strategy is to fire-fighting robot to find the fastest source of fire, home robot fire fighting, the fastest return to the starting point. The procedures were included in the start up module, the search for sources of ignition module, fire-fighting module,the home module.
This thesis mainly studies of fire-fighting robot intelligent optimization techniques improve the rapidity of the robot starting the sensitivity of the search for the fire source, fire source localization accuracy, as well as the stability of the machine running start, a global optimization strategy to robot fire source search strategy for optimization and improvement of home strategy. Finally, in the realization of the above strategies and fine-tuning of various types of sensor parameters roar, robot fire-fighting experiment, the standard venue and contrast and other fire-fighting thesis and parameter adjustment effectiveness.
目 录
摘 要 I
ABSTRACT II
目 录 III
1 绪 论 1
1.1 机器人产生的背景 1
1.2 国外机器人的发展现状 1
1.3 我国机器人的发展现状 2
1.4 灭火机器人的发展 2
1.5 本文工作与组织 3
2 设计方案 3
2.1 整体设计思路 4
2.2 寻线方式设计 5
2.3 灭火方式设计 5
2.4 电源及采样电路 5
2.5直流电机驱动电路 6
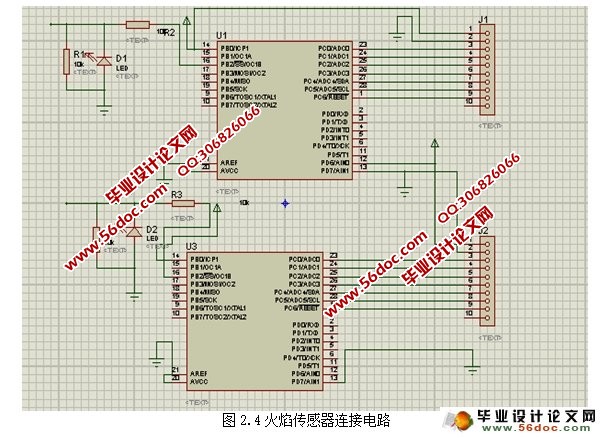
2.6传感器驱动电路电路 7
3 硬件选择 8
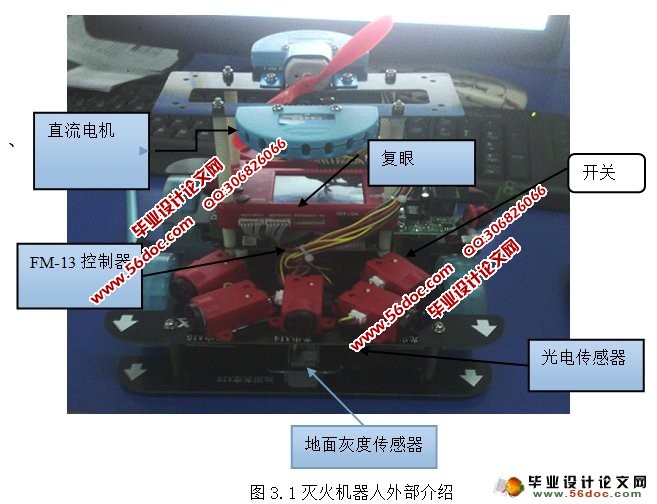
3.1灭火机器人控制器 8
3.1.2传感器模块 9
3.2.1复眼模块 9
3.2.2地面灰度传感器 11
3.2.3红外光电传感器 13
3.1.3电机模块 14
4 灭火机器人软件选择与介绍 18
5调试与检测 20
5.1 测试仪器及设备 20
5.2 功能测试 20
5.2.1 驱动电路部分 20
5.2.2 寻线部分 21
5.2.3 灭火效果部分 21
5.3 调试心得 21
结 论 22
致 谢 23
参考文献: 24
|
