基于激光传感器的智能车系统设计(单驱动寻白线)(CAD,程序,电路图
来源:wenku163.com 资料编号:WK16311892 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK16311892
资料介绍
基于激光传感器的智能车系统设计(单驱动寻白线)(CAD,程序,电路图)(任务书,开题报告,毕业论文17000字,cad图7张,电路图,答辩PPT,录像)
摘 要
本设计硬件平台采用带MC9S12XS128处理器的S12环境,软件平台为CodeWarrior IDE 4.7开发环境,车模为1:16的仿真车模。整个设计涉及车模机械结构调整、传感器电路设计及信号处理、控制算法和策略优化等多个方面。通过实验多套方案,并进行改进和升级,针对光线强度对传感器的影响进行了大量底层和选型测试,最终确定现有的系统结构和各项控制参数。
工作方式简介:通过对激光发射管的调制、发射和接收设计,单片机接收到激光返回来的赛道信息后通过处理识别前面的路径,配合编码器测速来控制速度和转向舵机,采用自制的H桥电路控制电机,使小车顺利完成比赛,并在此基础上通过调整参数再提高小车速度,优化小车行驶路径。
关键词:智能车,激光传感器,控制策略,路径识别,PID算法
Smart Car Design Based on Laser sensor (Single drive look for the white line)
Abstract
The design hardware platform S12 with MC9S12XS128 processor envirnment.Software platform for the CodeWarrior IDE 4.7 development environment.Cars 1:16 emulation car.Throughout the design involves Cars mechanical structural adjustment.Sensor cirucuit design and signal processing.Control algorithms and strategies for optimization.Through several sets of experimental programs,and make improvements and upgrades.Been extensively tested for the influence of liaht intensity sensor.Ultmately determine the existing system structure and the control paramenters
Work Profile:Through modulation of the laser tube,transmitting and receiving design,MCU receives the laser returns to track information through the identification in front fo path .With the encoder tachometer to control speed and steering servos.H-bridge circuit to control the motor using self.Make the car smooth finish.And improve the speed of the car by adjusting the parameters on this basis.Optimize the car driving path.
Keywords: smart car; laser sensor; control strategy; path identification;PID algorithm
1. 总体方案的确定
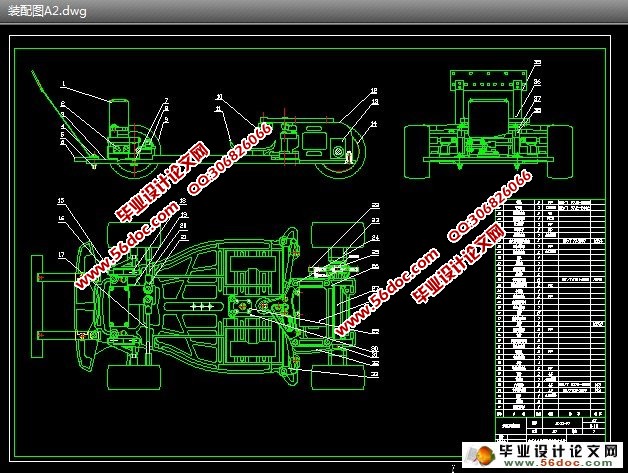
主要功能的确定以及功能结构和机构布局的初步确定。
2. 智能车的电源模块的设计
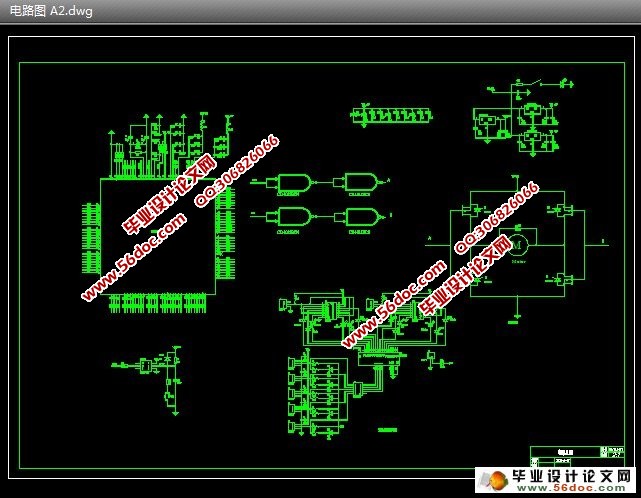
采用低压差型稳压芯片TPS7350设计稳压电路,输出噪声小的5v直流电,为传感器和单片机供电,使得系统正常运行。
3. 电机驱动模块的设计
利用两个BTS7970,搭建H桥,组成驱动电路,驱动电机正转和反转。
4. 舵机驱动模块的设计
利用S3010舵机和SD5舵机,设计舵机连杆,连接前轮转向和传感器摇头,通过输出不同的占空比,来控制舵机转向,从而使得智能车达到前轮转向和信号跟踪的目的。
5. 数据采集模块的设计
通过激光传感器的分时发射技术,以及激光调制技术和采集技术,采集各个发射管的信号,并对信号进行放大和耦合处理后输入单片机;另外,经过编码器测定智能车的行驶速度信号,通过脉冲的形式输入单片机的外部中端口。
6. 控制程序的设计
通过编写程序,处理激光传感器和编码器的信号,并通过PID算法,和部分局部修正算法,使输出控制信号,控制舵机转角和电机驱动。
7. 智能车调试
调试智能车,使得智能车的速度≥5m/min。


目录
1 绪论 1
1.1 概述 1
1.1.1 主芯片MC9S12XS128 功能概述 1
1.1.2 MC9S12XS128B最小系统设计 3
1.2 智能车发展和应用前景 6
1.2.1 智能车的发展历史 6
1.2.2 应用前景 7
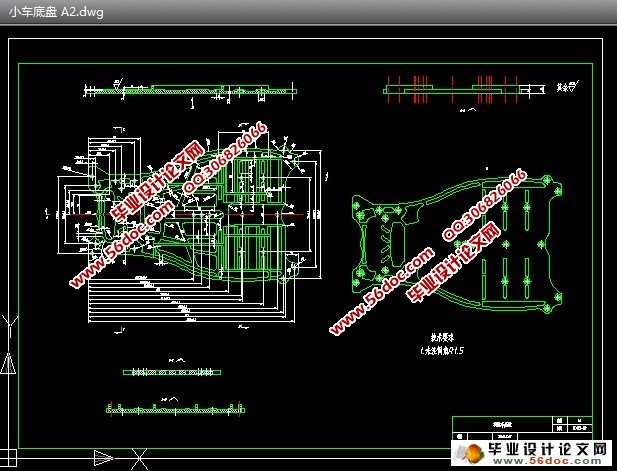
2 车模安装 9
2.1 前轮机械调节 9
2.1.1 主销内倾角 9
2.1.2 主销后倾角 10
2.1.3 前轮外倾角 10
2.1.4 前轮前束 10
2.2 后轮机械调节 11
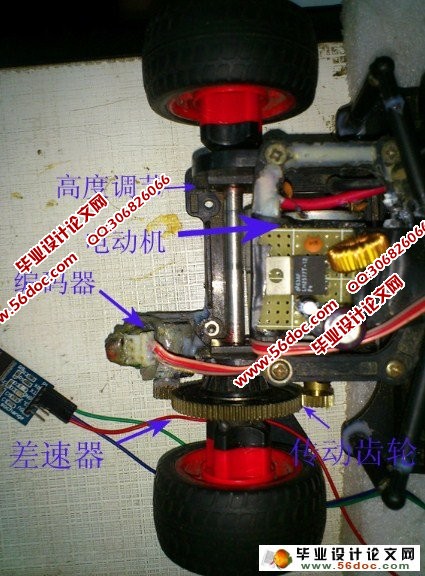
2.2.1 传动齿轮的调节 11
2.2.2 后轮距的选择 12
2.2.3 离地间隙的调整 12
2.2.4 差速器的调节 12
2.3 舵机的安装及转向分析 12
2.3.1 舵机的转向分析 13
2.3.2 整车布局 14
3 方案的论证与选择 15
3.1 路径识别路径识别信号部分 15
3.1.1 激光传感器的选择 15
3.1.2 激光传感器及其支架的安装 15
3.2 电动机驱动与调速 16
3.3 速度检测 20
3.4 本章小结 20
4 硬件电路设计 21
4.1 电源电路 21
4.1.1 激光传感器的供电 21
4.1.2 舵机供电 21
4.1.3 其他器件的供电 22
4.2 电机驱动 22
4.3 激光传感器 23
4.4 测速电路 24
4.5 本章小结 24
5 系统软件设计 25
5.1 主流程 25
5.2 赛道情况检测 27
5.2.1 激光传感器信号采集 27
5.2.2 黑线信息的提取 27
5.2.3 路径信息采集及处理方法 28
5.3 速度检测 30
5.4 本章小结 30
6 开发与调试 31
6.1 开发环境的应用 31
6.2 BDM调试器的使用 34
6.2.1 Hiwave初始参数设置 34
6.3 程序下载 36
6.4 程序调试 38
6.5 本章小结 38
7 总结 39
参考文献 40
致谢 41
附录A 42
附录B 54
|
