Abstract
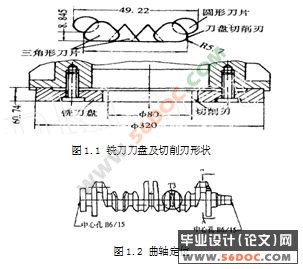
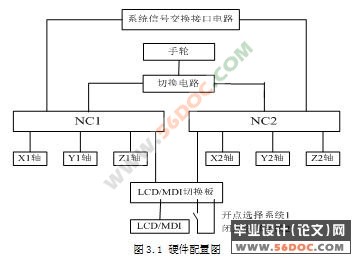
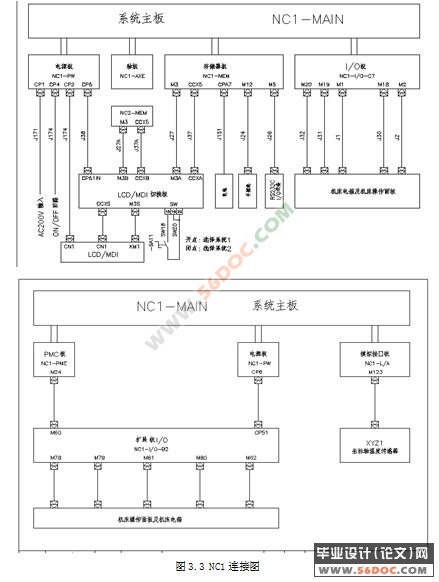
Double 0M systems are applied in retrofit of FKP20 internal crankshaft milling in order to meet the requirement on 2 channel 6 axes. Linear encoders are equipped for full close-loop control. Synchronization between 2 systems is base on M code. To the individually vibrating axis adopt the double position feedback control mode. Through the PMC procedure which had designed complete the axis to return to the reference point, Designed the special interruptive macro procedure to make the cutter return to the center. The practical application shows that the retrofit is successful.
Key word:CNC、Retrofit、Crankshaft milling