Abstract
Automatic Guided Vehicle(AGV)system is an automated system consists of software and hardware.It includes several technologies,such as computer, automatic control,electronic,image processing,communication,machinery and so on.
The working principle,classification, structure,application and research of AGV are introduced in detail in this paper, above which, the visual guiding AGV based on embedded control system is designed.The main work and research are as follows:
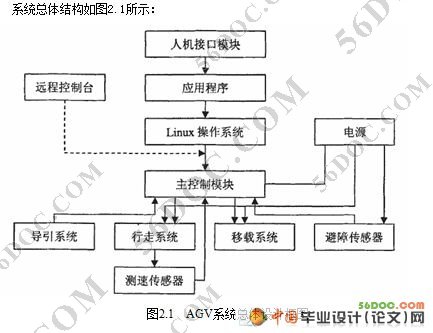
(1)The full system of the AGV is designed.
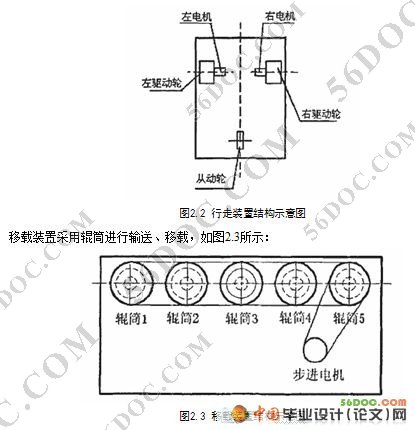
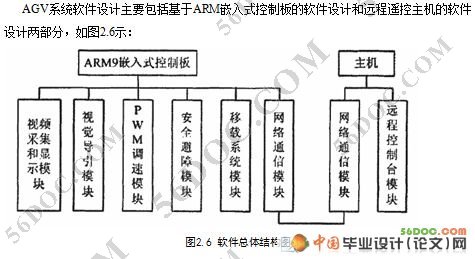
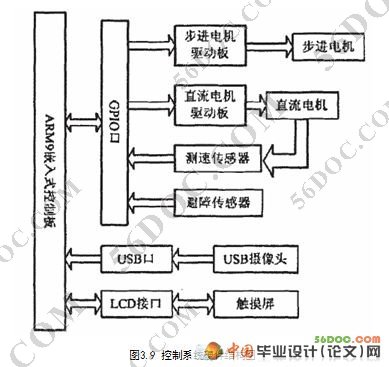
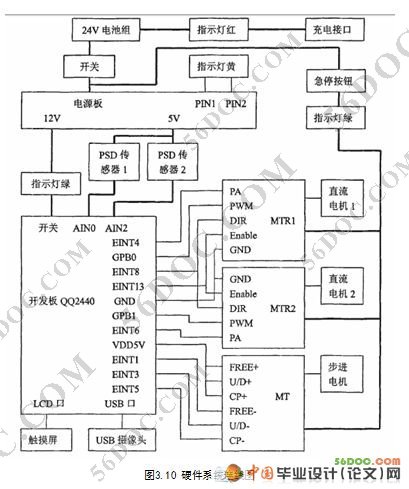
(2)The hardware of the AGV is designed.
(3)Zoning control algorithm based on visual guiding is designed;
Finally, the system debugging is accomplished,and the desired requirements are achieved.
Key words:AGV,Embedded System.