自动堆垛式载运机器人的设计(CAD图,SolidWorks,STEP,IGS三维图)

自动堆垛式载运机器人的设计(CAD图,SolidWorks,STEP,IGS三维图)(论文说明书9000字,CAD图纸10张,SolidWorks三维图,x_t,STEP,IGS通用三维格式) 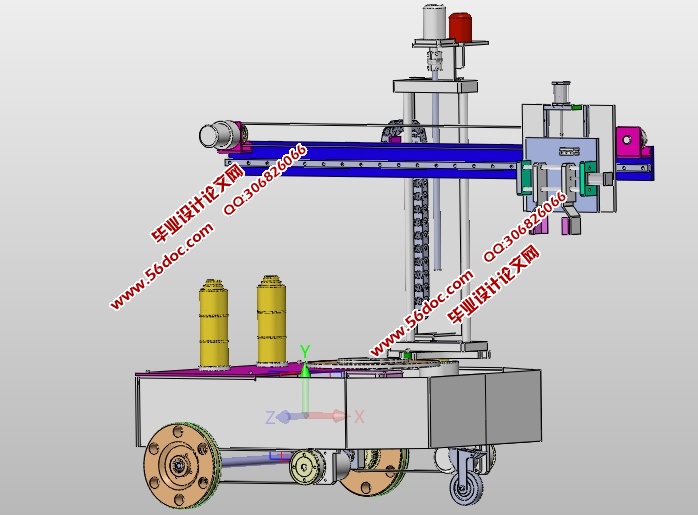 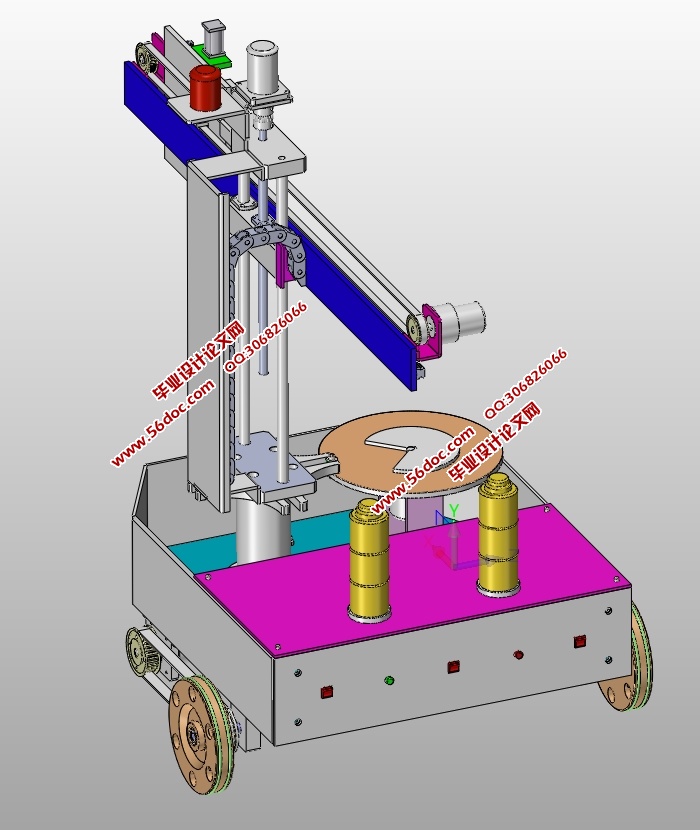 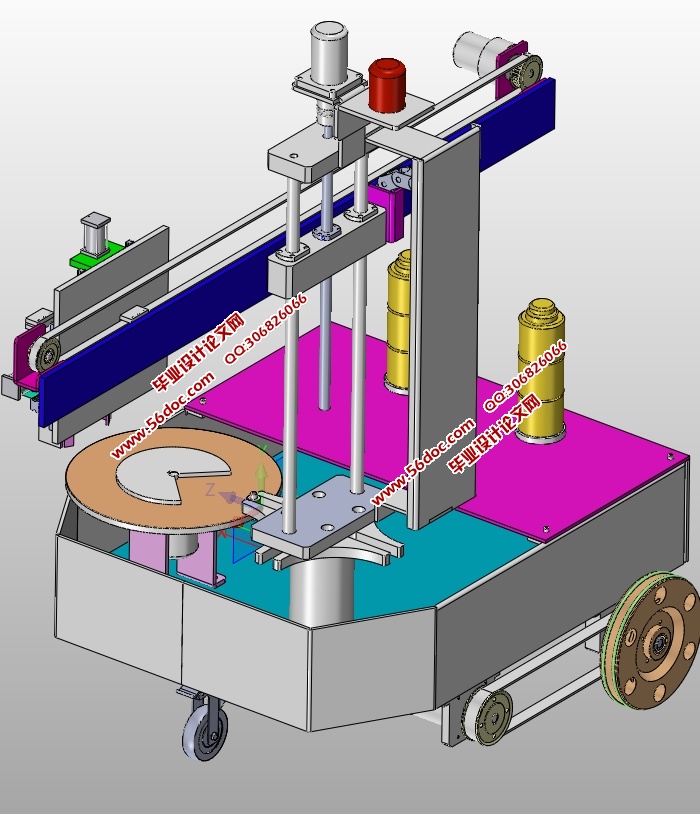 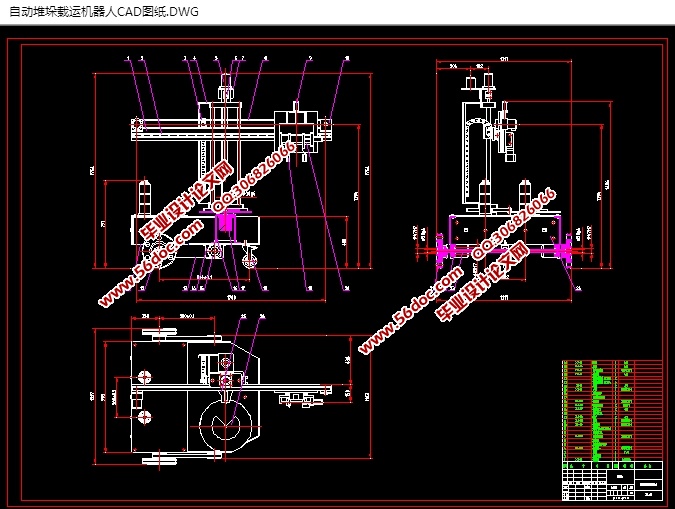   
|
自动堆垛式载运机器人的设计(CAD图,SolidWorks,STEP,IGS三维图)(论文说明书9000字,CAD图纸10张,SolidWorks三维图,x_t,STEP,IGS通用三维格式)
|