机械手模型设计及制作(含任务书,开题报告,外文翻译,毕业论文说明书21000字,进度检查表,CAD图纸5张)
摘要
科学发展观为我国工程技术的发展开辟了广阔道路,而机械手作为一种高科技自动化生产设备,已经广泛应用于国民经济的各个领域,这就对我们的教育培训部门提出了新的要求。因此,为了适应社会发展的形势,在现有技术基础上设计一台教学型机械手有着深远的科教意义。
本课题设计的教学型搬运机械手,主要包括机械手的总体方案设计、机械手的机械结构设计以及驱动、控制系统设计等,实现了机械手手部的四自由度运动:手臂的升降、伸缩和手腕、手臂的回转。设计中分析了教学型机械手的功能要求和现实意义,通过气压缸来实现手臂的升降和伸缩,采用回转气压缸来实现手腕和手臂的回转。设计的机械手结构简单、便于操作,在单片机的控制下完成预期的动作,能给学生以直观的印象,达到教学演示的目的。
关键词: 机械手;气动装置;四自由度;控制系统
Abstract
Scientific concept of development of engineering technology has opened up a broad road, while the robot as a high-tech automated production equipment, has been widely used in various fields of national economy, which the education and training sector of our proposed new requirements. Therefore, in order to adapt to the situation of social development, based on existing technology to design a teaching type robot science has far-reaching significance.
The subject of design for teaching handling robots, mainly consists of robot's overall design, robot mechanical structure design, as well as drive, control system design, implementation of the manipulator hands of four degrees of freedom: the arm movements, stretching and wrist, arm, rotary. The design of the teaching function of mechanical hand requirements and practical significance, achieved by pneumatic cylinders push the arm movements and stretching,rotary pneumatic cylinders used to achieve arm and wrist rotation.Manipulator design simple, easy to operate, under the control of the MCU to complete the desired action, giving the students a visual impression, to achieve the purpose of teaching demonstration.
Keywords: Manipulator; Pneumatic device; Four Degrees of Freedom; The control system
课题研究的主要内容
本课题主要研究了国内外机械手发展的现状,阐述了教学型机械手的功能要求和现实意义,通过对机械手工作原理的学习和了解,熟悉了机械手的运动机理。在现有机械手技术基础上,确定了教学型搬运机械手的基本系统结构,对机械手的运动进行了简单的力学模型分析,完成了机械手传动部分、执行系统、驱动系统等系统的相关设计,并对机械手的控制技术进行了一定的阐述。
1.5教学用机械手的功能要求及现实意义
1.5.1 教学用机械手的功能要求
本次设计的机械手是一台教学用搬运机械手,实现手部四自由度运动,完成物件的搬运工作。能通过相关的演示可以给学生直观的印象,在这种前提和背景下,这就要求所设计的机械手达到以下目标:
1.成本低廉,必要时可以降低精度要求;
2.机械结构简单,便于学生掌握机械手结构特点;
3.性能良好,可以较好的完成演示动作;
4.各部分结构最好方便拆卸,以便于维修保养。
1.5.2 教学用机械手的现实意义
科学发展观为我国工程技术的发展开辟了广阔道路,而机械手作为一种高科技自动化生产设备,已经广泛应用于国民经济的各个领域,这就对我们的教育培训部门提出了新的要求。因此,为了适应社会发展的形势,在现有技术基础上设计一台教学型机械手有着深远的科教意义。
机械手的技术参数列表
一.用途:教学型机械手
二.设计技术参数:
1.抓重:10千克
2.自由度数:4个自由度
3.座标型式:圆柱型座标
4.最大工作半径:1000mm
5.手臂最大中心高:1380mm
6.手臂运动参数
伸缩行程400mm
伸缩速度50mm/s
升降行程200mm
升降速度50mm/s
回转范围00-2400
回转速度900/s
7.手腕运动参数
回转范围 00-1800
回转速度1800/s
8.定位精度:±0. 5mm
9.缓冲方式:液压缓冲器
10.传动方式:气压传动
11.控制方式:点位程序控制(采用单片机)

目 录
1 绪论 1
1.1 机械手概述 1
1.2 机械手的组成和分类 1
1.2.1 机械手的组成 1
1.2.2 机械手的分类 4
1.3 国内外发展状况 5
1.4课题研究的主要内容 6
1.5教学用机械手的功能要求及现实意义 6
1.5.1 教学用机械手的功能要求 6
1.5.2 教学用机械手的现实意义 6
2 机械手的设计方案 7
2.1 机械手的座标型式与自由度 7
2.1.1 机械手的坐标型式 7
2.1.2 机械手的自由度 8
2.2 机械手的手部结构方案设计 8
2.3 机械手的主要参数 10
2.4 机械手的技术参数列表 11
3 机械手机械系统设计 12
3.1 手部结构设计 12
3.1.1 设计时考虑的几个问题 12
3.1.2手爪夹持装置的机构选型 12
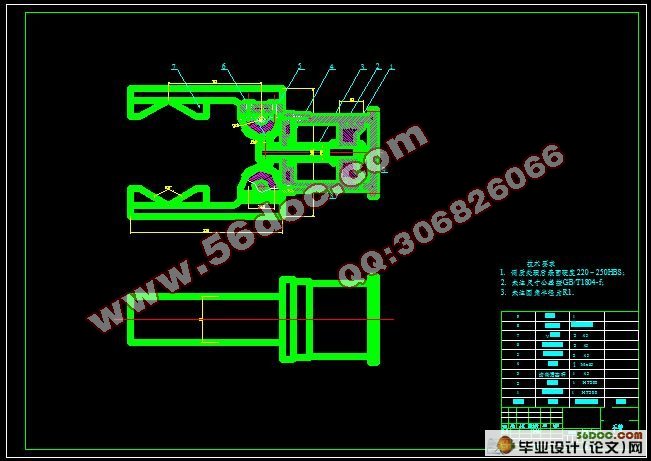
3.1.3 手部夹紧气缸的设计 13
3.2手腕结构设计 17
3.2.1 手腕的自由度 18
3.2.2 手腕的驱动力矩的计算 18
3.3手臂结构设计 22
3.3.1手臂伸缩与手腕回转部分 22
3.3.2手臂升降和回转部分 24
3.3.3手臂升降气缸的设计 24
3.3.4手臂回转缸体的设计 27
4 机械手气压系统的设计 29
4.1气压传动系统工作原理图 29
4.2气动元件介绍 29
5 机械手控制系统设计 33
5.1 控制系统的结构分类 33
5.2 控制方式 33
5.3机械手的控制 34
6 结论与展望 36
致谢 37
参考文献 38
|
