ЙЄвЕЛњЦїШЫМаГжЦїЕФЩшМЦ(КЌCADСуМўзАХфЭМ)
РДдДЃКwenku163.com зЪСЯБрКХЃКWK16310982 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK16310982
зЪСЯНщЩм
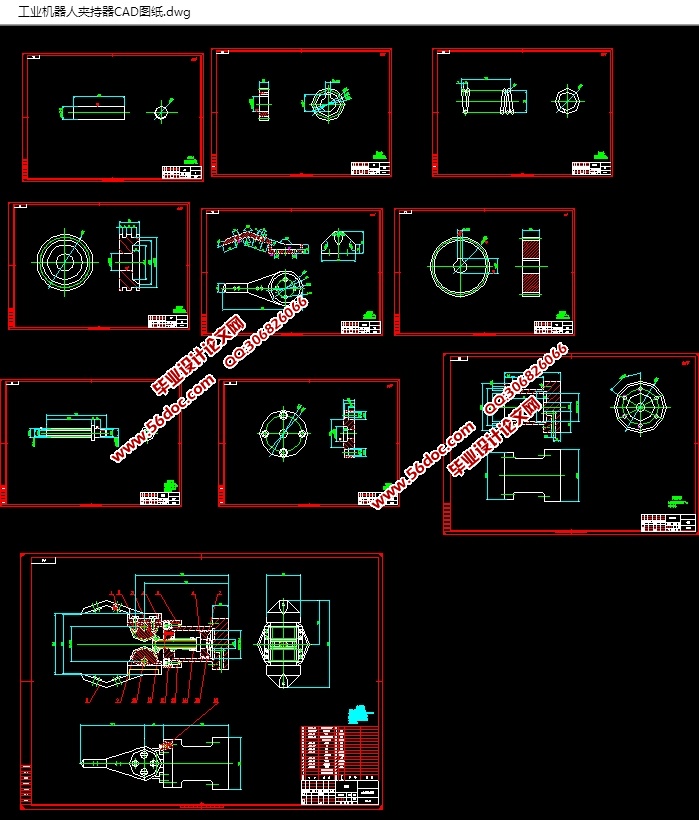
ЙЄвЕЛњЦїШЫМаГжЦїЕФЩшМЦ(КЌCADСуМўзАХфЭМ)(ТлЮФЫЕУїЪщ12000зж,ЭтЮФЗвы,CADЭМжН10еХ)
еЊ вЊ
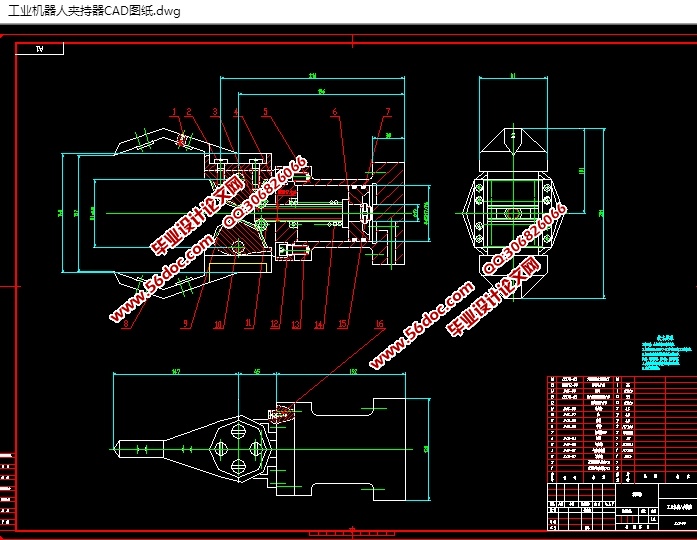
БОДЮЕФЩшМЦРДдДгкЙЄвЕЛњЦїШЫМаГжЦїЛњЙЙИќаТЛЛДњЛљДЁжЎЩЯЃЌЭЈЙ§ЩшМЦГіЙЄвЕЛњЦїШЫМаГжЦїЃЌДгЖјРДТњзуЕБНёЙЄвЕЛњЦїШЫзщГЩЛњЙЙжЎвЛЕФМаГжЦїИїЗНУцадФмВЛзуЕФШБЯнЁЃБОБЯвЕЩшМЦПЮЬтРДздгкЦѓвЕЕФЩњВњЪЕМЪЃЌЭЈЙ§ЩшМЦГіаТаЭЙЄвЕЛњЦїШЫМаГжЦїЃЌДгЖјРДеЦЮеЙЄвЕЛњЦїШЫМаГжЦїЕФећИіЩшМЦЩњВњСїГЬЃЌХрбјЙЄГЬвтЪЖЁЃ
ЮвЙњЩњВњЕФЙЄвЕЛњЦїШЫМаГжЦїДгЗТжЦПЊЪМЦ№ВНЃЌНќЦкВњЦЗЕФжЪСПНЯдчЦкгаЫљЬсИпЁЃЕЋЪмЙњВњХфЬзМўжЪСПМАЩшМЦЫЎЦНЕШЕФгАЯьЃЌЮвЙњФПЧАЩњВњЕФЙЄвЕЛњЦїШЫМаГжЦїЕФзмЬхЫЎЦНгыНјПкВњЦЗМАИлПкгУЛЇЕФвЊЧѓШдгаНЯДѓВюОрЃЌЙЄвЕЛњЦїШЫМаГжЦїЕФЩњВњвВЪЧШчДЫЃЌЮЊТњзуЪаГЁашЧѓЃЌПЊЗЂГівЛжжаТаЭЕФЙЄвЕЛњЦїШЫМаГжЦїЪЦдкБиааЃЁ
БОЮФЭЈЙ§дЫгУДѓбЇЫљбЇЕФжЊЪЖЃЌЬсГіСЫЙЄвЕЛњЦїШЫМаГжЦїЕФНсЙЙзщГЩЁЂЙЄзїдРэвдМАжївЊСуВПМўЕФЩшМЦжаЫљБиаыЕФРэТлМЦЫуКЭЯрЙиЧПЖШаЃбщЃЌЙЙНЈСЫЙЄвЕЛњЦїШЫМаГжЦїзмЕФжИЕМЫМЯыЃЌДгЖјЕУГіСЫИУЙЄвЕЛњЦїШЫМаГжЦїЕФгХЕуЪЧИпаЇЃЌОМУЃЌВЂЧвАВШЋЯЕЪ§ИпЃЌЖдЬсИпЙЄвЕЛњЦїШЫЕФЙЄзїаЇТЪЃЌМѕЩйШЫЙЄЭЖШыЃЌдіЧПМаГжжЪСПЕШЕШЦ№ЕНСЫКмДѓЕФзїгУЕФНсТлЁЃ
ЙиМќДЪЃКЙЄвЕЛњЦїШЫМаГжЦїЃЛИпаЇЃЛШЫЙЄЭЖШыЃЛНсТл
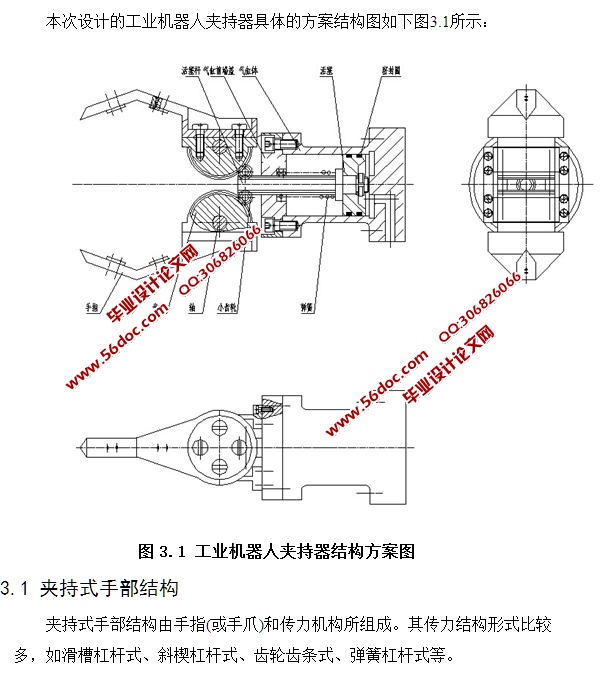
МаГжЪНЪжВПНсЙЙ
МаГжЪНЪжВПНсЙЙгЩЪжжИ(ЛђЪжзІ)КЭДЋСІЛњЙЙЫљзщГЩЁЃЦфДЋСІНсЙЙаЮЪНБШНЯЖрЃЌШчЛЌВлИмИЫЪНЁЂаБаЈИмИЫЪНЁЂГнТжГнЬѕЪНЁЂЕЏЛЩИмИЫЪНЕШЁЃ
3.1.1 ЪжжИЕФаЮзДКЭЗжРр
МаГжЪНЪЧзюГЃМћЕФвЛжжЃЌЦфжавдЖўжЇЕуЛизЊаЭЮЊЛљБОаЭЪНЁЃЕБЖўжЇЕуЛизЊаЭЪжжИЕФСНИіЛизЊжЇЕуЕФОрРыЫѕаЁЕНЮоЧюаЁЪБЃЌОЭБфГЩСЫвЛжЇЕуЛизЊаЭЪжжИ;ЭЌРэЁЃ
3.1.2 ЩшМЦЪБПМТЧЕФМИИіЮЪЬт
(вЛ)ОпгазуЙЛЕФЮеСІ(МДМаНєСІ)
(Жў)ЪжжИМфгІОпгавЛЖЈЕФПЊБеНЧ
(Ш§)БЃжЄЙЄМўзМШЗЖЈЮЛ
ЮЊЪЙЪжжИКЭБЛМаГжЙЄМўБЃГжзМШЗЕФЯрЖдЮЛжУЃЌБиаыИљОнБЛзЅШЁЙЄМўЕФаЮзДЃЌбЁдёЯргІЕФЪжжИаЮзДЁЃР§ШчдВжљаЮЙЄМўВЩгУДј“V”аЮУцЕФЪжжИЃЌвдБуздЖЏЖЈаФЁЃ
(ЫФ)ОпгазуЙЛЕФЧПЖШКЭИеЖШ
(Юх)ПМТЧБЛзЅШЁЖдЯѓЕФвЊЧѓ
ФП ТМ
1 аїТл 1
1.1 ПЮЬтЕФРДдДгыбаОПЕФФПЕФКЭвтвх 1
1.2 ЙЄвЕЛњЦїШЫЕФзщГЩ 2
1.2.1ЙЄвЕЛњЦїШЫЕФзщГЩ 3
1.2.2 ЙЄвЕЛњЦїШЫЕФЗжРр 4
1.3 ЙњФкЭтЗЂеЙзДПі 5
1.4 ЙЄвЕЛњЦїШЫЕФГЩБОгыШЫЙЄГЩБОЕФБШНЯ 6
1.5 ЙЄвЕЛњЦїШЫЕФзїгУ 8
2 ЙЄвЕЛњЦїШЫЕФЩшМЦЗНАИ 10
2.1 зљБъаЭЪНгыздгЩЖШЕФЩшМЦ 12
2.2 ЪжВПНсЙЙЗНАИЕФЩшМЦ 14
2.3 ЪжЭѓНсЙЙЗНАИЕФЩшМЦ 15
2.4 ЪжБлНсЙЙЗНАИЕФЩшМЦ 16
3 ЙЄвЕЛњЦїШЫМаГжЦїНсЙЙЕФЩшМЦ 18
3.1 МаГжЪНЪжВПНсЙЙ 20
3.1.1ЪжжИЕФаЮзДКЭЗжРр 22
3.1.2ЩшМЦЪБПМТЧЕФМИИіЮЪЬт 24
3.1.3ЪжВПМаНєЦјИзЕФЩшМЦ 26
3.2 ЦјИзЧ§ЖЏСІОиЕФМЦЫу 28
3.3 ЦјИзЧ§ЖЏСІОиЕФМЦЫуаЃКЫ 29
4 ЙЄвЕЛњЦїШЫМаГжЦїжаЙиМќСуВПМўЕФЧПЖШМЦЫугыаЃКЫ 30
4.1 ГнТжЕФЧПЖШМЦЫугыаЃКЫ 32
4.2 жсЕФЧПЖШМЦЫугыаЃКЫ 33
НсТл 34
жТаЛ 35
ВЮПМЮФЯз 36
|
