锻压机上下料机械手的机械及PLC控制设计(含程序,CAD梯形图装配图)(论文说明书13600字,CAD图7张)
The mechanical and control design of PLC manipulator under the forging press
摘要
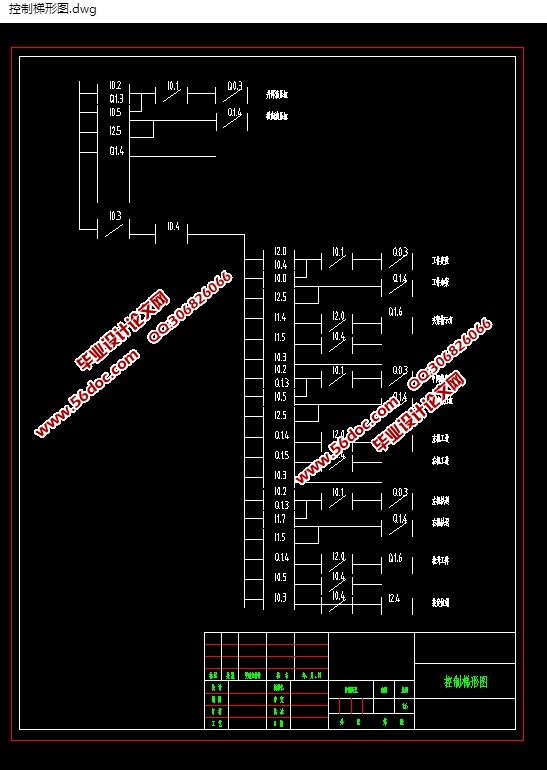
本文简要介绍了工业机器人的概念,组成和分类以及自由度和坐标形式,并阐述了液压技术的特点以及其在国内外发展的特点和PLC控制。
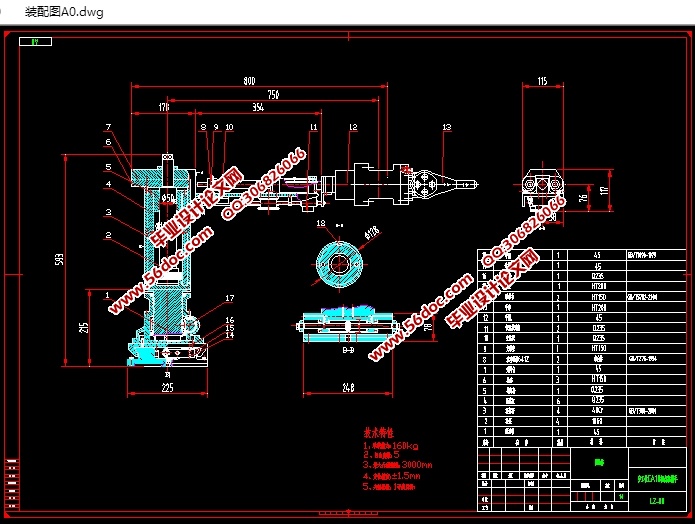
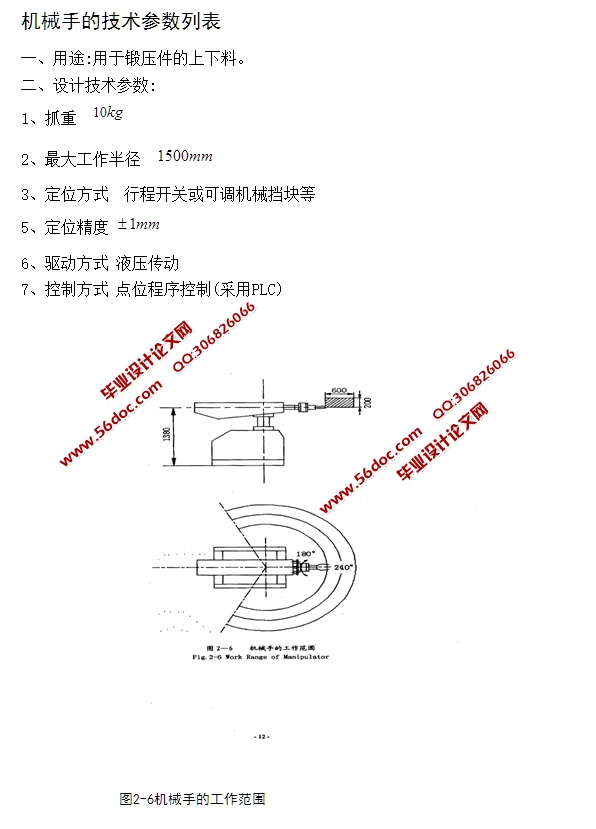
本文通过对锻压机取件机械手进行总体设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,对机械手的夹持式手部、手腕结构进行了结构设计,计算出了使它们动作需要的扭矩,同时设计了机械手的液压系统,机械手工作图液压系统原理图,液压系统的工作原理图的参数化绘制进行了研究,并对液压机械手所使用的轴承,传动轴等进行了计算,选择标准件。大大提高了绘图效率和图纸质量,这些早期的工作为后续的液压机械手的设计做足了充分的准备。
本文所设计的液压机械手在很大方面提高了生产效率,节约了生产成本,对后续的机械手的研究和发展也有着重要的意义。