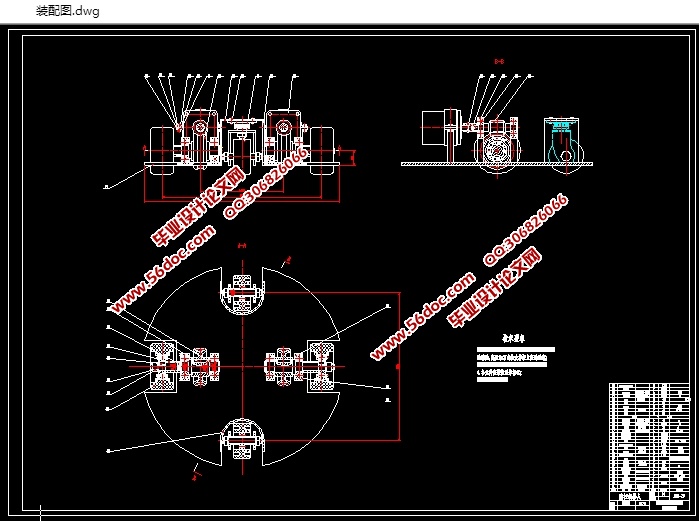
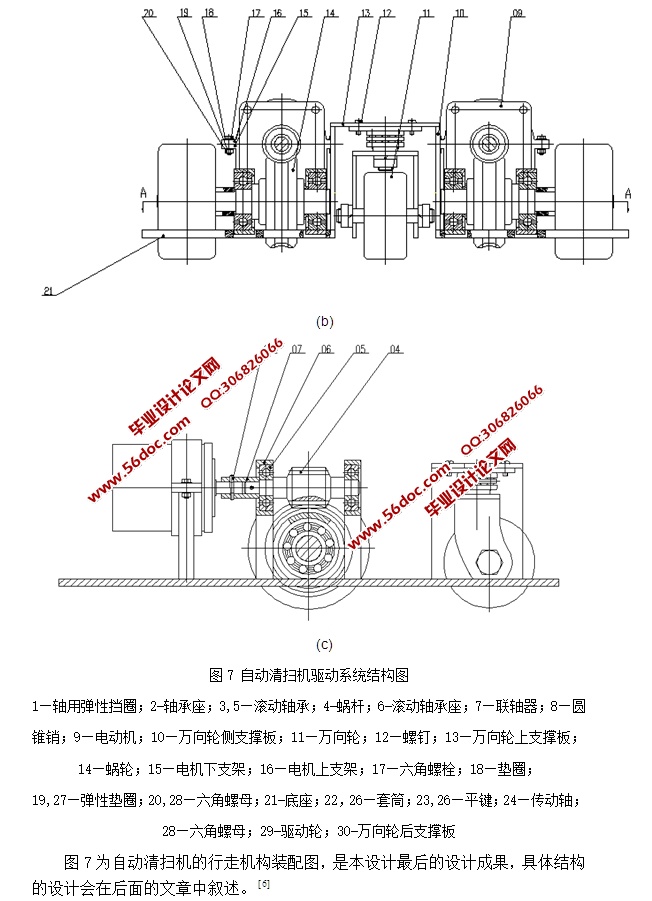
家用自动清扫机(扫地机)的行走机构设计(含CAD零件装配图) 来源:wenku163.com 资料编号:WK16311059 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK16311059 我要下载该资源 资料介绍 家用自动清扫机(扫地机)的行走机构设计(含CAD零件装配图)(设计说明书10500字,CAD图5张) 摘 要 随着经济和科技的发展,家用自动机器人的研究有了突飞猛进的进步,许多以前只能服务国家重要领域的成功技术已经使用于服务普通大众的机器人中。自动清扫机器人属于服务机器人,世界各国特别是发达国家正致力于研究开发和广泛运用服务机器人,中国许多高等学府在这方面的研究也取得了不错的成果。 本文在比较了国内外许多种家用机器人产品的基础上,提出了家庭清扫机器人行走机构的设计方案。介绍了清扫机器人行走机构的各个组成部分,着重介绍了自动清扫机器人的蜗轮蜗杆设计等。并用CAD画出了行走机构的总体结构,以及蜗轮蜗杆和驱动轮万向轮的装配图及零件图。完成了行走机构的全部设计,成本较低但尺寸较大。 由此可见,想要自动清扫机器人将来具有广阔的市场前景,那么设计出来的产品必须要有高的性价比。本设计最终完成了所有的设计任务,综合运用了大学所学的专业知识,很大程度的提高了综合理解能力。 关键字:清扫机器人;行走机构;蜗轮蜗杆 自动清扫机器人吸尘机构介绍 现代吸尘器技术主要包括两类:气流滤尘尘器和真空吸尘器。通过比较现有清扫机器人本文决定采用气流滤尘器,气流滤尘器是一个全封闭系统,其原理是应用附壁效应形成抵压涡流气体,最后把废物留在了吸尘器的气流腔中。根据机器人的本体形状和移动路径以及吸尘效果,将吸尘机构的吸嘴设计在机器人本体的前方,而两个旋转刷子,分别位于机器人的左右两边,这样就可以提高清扫效率又能方便墙角清扫。控制旋转刷子的电动机以及吸尘机构的电动机采用直流电动机。 目 录 1. 绪论 1 1.1. 研究的背景 1 1.2. 自动清扫机器人的国内研究现状 1 1.3. 研究的目的与意义 2 1.4. 当前清扫机器人存在的问题与分析 3 2 小型自动清扫机器人总体结构的介绍 4 2.2 自动清扫机器人控制部分介绍 4 2.3 自动清扫机器人电源部分介绍 5 2.4 小型自动清扫机器人行走机构介绍 5 2.5 轮式行走机构的总体结构 5 2.6 行走机构的运动分析及总体结构 6 3 确定各部件及零件的结构 9 3.1 步进电机的选用 9 3.2 底座 14 3.3 驱动轮 15 3.4 蜗轮蜗杆 15 3.5 蜗轮蜗杆的强度校核 18 3.6 从动轮 18 3.7 轴承 19 参考文献 22 4 小结 23 谢 辞 24