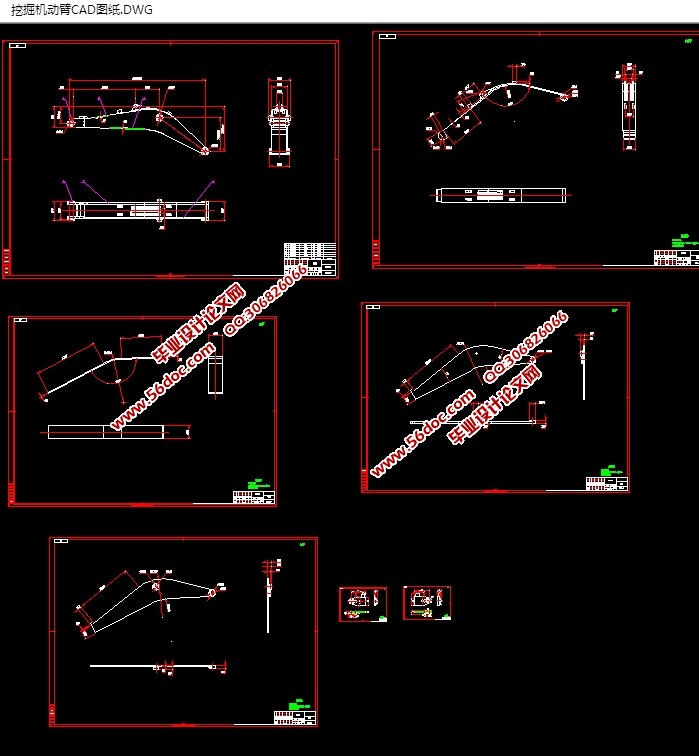
ЭкОђЛњЖЏБлКИНгЙЄвеЗжЮі(КЌCADЭМ,SolidWorks,IGSШ§ЮЌЭМ)(ТлЮФЫЕУїЪщ8200зж,CADЭМжН7еХ,SolidWorksШ§ЮЌЭМ,IGSЭЈгУШ§ЮЌИёЪН,STEPЭЈгУШ§ЮЌИёЪН)
The analysis on welding process of excavator boom
еЊвЊ
ЫцзХЙњФкЙЄГЬЛњаЕаавЕЕФПьЫйЗЂеЙ,ЭкОђЛњЪаГЁЕФОКељвВШеЧїМЄСв,ИїжїЛњГЇВЛЕЋДгГЩБОЩЯ,вВдкжЪСПЩЯеЙПЊСЫМЄСвЕФОКељЁЃЖЏБлВПЗж,зїЮЊЭкОђЛњзюживЊЕФГадиНсЙЙ,дкЙЄзїжаГаЪмзХОјДѓЖрЪ§ЕФдиКЩ,ЪЧзюГЃЗЂЩњЙЪеЯЕФВПЗж,ЖјЦфжагШвдЖЏБлЕФЪЇаЇгАЯьзюДѓ,ЖЏБлжЪСПГЩЮЊгАЯьећЛњВњЦЗПЩППадЕФвђЫижЎвЛЁЃ ЮвЙњЩњВњЕФЭкОђЛњДгЗТжЦПЊЪМЦ№ВНЃЌНќЦкВњЦЗЕФжЪСПНЯдчЦкгаЫљЬсИпЁЃЕЋЪмЙњВњЖдЭкОђЛњЕФКИНгжЪСПМАЩшМЦЫЎЦНЕШЕФгАЯьЃЌЮвЙњФПЧАЩњВњЕФЭкОђЛњЕФзмЬхЫЎЦНЃЌгыНјПкВњЦЗМАИлПкгУЛЇЕФвЊЧѓШдгаНЯДѓВюОрЃЌКИНгЙЄвежЎМфЕФВюОргШЮЊУїЯдЃЌЮЊТњзуЪаГЁМАКИНгЙЄвеашЧѓЃЌЖдЭкОђЛњКИНгЙЄвеНјааЩюВуДЮЕФбаОПКЭЗжЮіЪЦдкБиааЃЁ
БОБЯвЕЩшМЦПЮЬтРДздгкЦѓвЕЕФЩњВњЪЕМЪЃЌЭЈЙ§ЖдЭкОђЛњКИНгЙЄвеНјааЗжЮіКЭЩшМЦЃЌеЦЮеЭкОђЛњКИНгЕФећИіЩњВњСїГЬЃЌХрбјЙЄГЬвтЪЖЁЃЫцзХЙњМвОМУЕФЗБШйМАЛљДЁНЈЩшЕФЗЩЫйЗЂеЙЃЌЭкОђЛњЕФгІгУМАашЧѓШевцдіГЄЁЃШЛЖјдкЭкОђЛњЩњВњжЦдьЙ§ГЬжаЕФЖЏБлКИНгЙЄвеГЩЮЊЭкОђЛњећЛњжЪСПМАадФмЕФживЊОіЖЈвђЫиЃЌКИНгБфаЮЕФПижЦЖдЭкОђЛњЖЏБлКИНгЙЄвегазХживЊЕФвтвхЁЃ
ЙиМќДЪЃКаавЕЃЛЭкОђЛњЃЛКИНгЙЄвеЃЛвтвх
Abstract
For a lot of special places, like the risk is very big, or we are difficult to reach, such as disarm bombs, unknown corresponding domains such as detection, probing deep of more dangerous situation usually need to implement the robot.It’s a main part of robot for micro pedipulator, walking robots and more than six feet, compared to the eight legged robot, because of strong bearing capacity, good stability, which the meritss is simple construction, So a large number of researchers around the world, start .This paper mainly to the four bar mechanism as the main execution elements to design of micro walking the whole scheme of the four bar mechanism.
Its principle is diagonal synchronization, leg activity by the structure of the crank rocker, front leg movements around the same, it detailed performance curve characteristics of the connecting rod,when the curve trajectory diagonal straight line segment, the robot is stationary, the motion trajectory when the diagonal curve is slanting line do the walking.
KeywordsЃКManufacturing ,Location, Clamping, Process
БОПЮЬтЪЧЖдЭкОђЛњКИНгЙЄвеЗжЮіЁЃОпЬхАќРЈвдЯТФкШнЃК
(1)НщЩмЭкОђЛњЛњЖЏБлЕФНсЙЙдРэЃЌКЯРэЕиЩшМЦКЭИФЩЦЦфКИНгЙЄвеЕШЃЌШЗЖЈЭкОђЛњЛњЖЏБлЕФНсЙЙЁЃ
(2)ЖдШЗЖЈКУЕФЭкОђЛњЛњЖЏБлНјааЛњаЕНсЙЙЩшМЦЁЃ
(3)ЭкОђЛњЖЏБлЕФВФСЯбЁдёМАЦфКИНгЙЄвеЗжЮіЁЃ
2 ЭкОђЛњЖЏБлНсЙЙЕФЩшМЦ
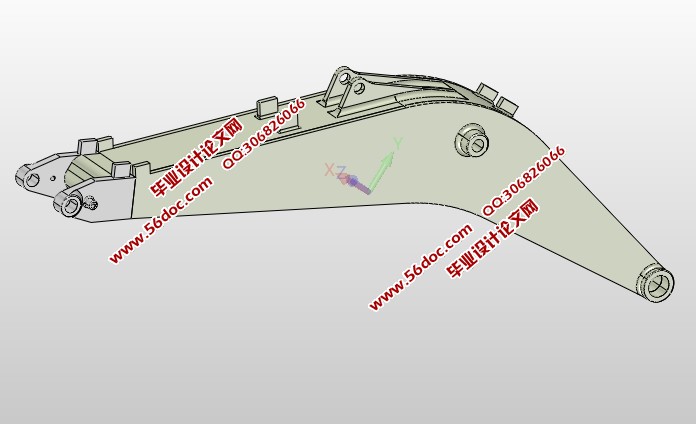
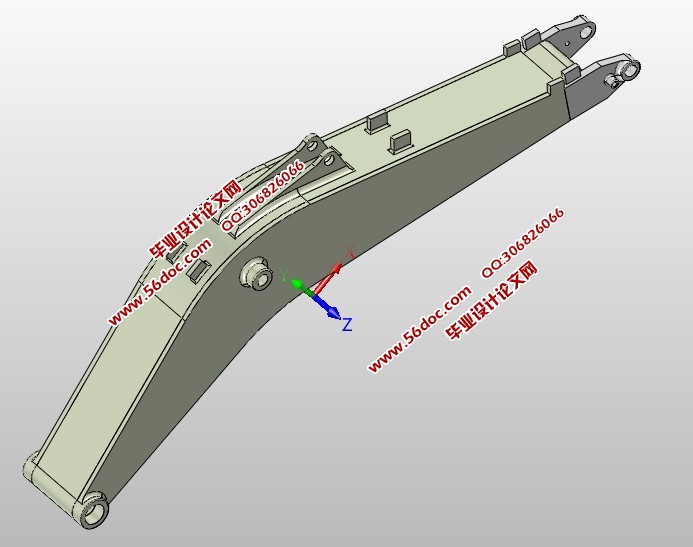
2.1 ЭкОђЛњЖЏБлЕФзщГЩНсЙЙ
БОДЮЩшМЦЕФЭкОђЛњЖЏБлжївЊгЩАВзААхЃЌЩЯЁЂЯТЗтАхЃЌЕѕЖњЕШзщГЩЁЃ
2.2 ЭкОђЛњЖЏБлЕФЙЄзїдРэ
вКбЙЭкОђЛњжївЊгЩЗЂЖЏЛњЁЂвКбЙЯЕЭГЁЂЙЄзїзАжУЁЂаазпзАжУКЭЕчЦјПижЦЕШВПЗжзщГЩЁЃвКбЙЯЕЭГгЩвКбЙБУЁЂПижЦЗЇЁЂвКбЙИзЁЂвКбЙТэДяЁЂЙмТЗЁЂгЭЯфЕШзщГЩЁЃЕчЦјПижЦЯЕЭГАќРЈМрПиХЬЁЂЗЂЖЏЛњПижЦЯЕЭГЁЂБУПижЦЯЕЭГЁЂИїРрДЋИаЦїЁЂЕчДХЗЇЕШЁЃвКбЙЭкОђЛњвЛАугЩЙЄзїзАжУЁЂЛизЊзАжУКЭаазпзАжУШ§ДѓВПЗжзщГЩЁЃИљОнЦфЙЙдьКЭгУЭОПЩвдЧјЗжЮЊЃКТФДјЪНЁЂТжЬЅЪНЁЂВНТФЪНЁЂШЋвКбЙЁЂАывКбЙЁЂШЋЛизЊЁЂЗЧШЋЛизЊЁЂЭЈгУаЭЁЂзЈгУаЭЁЂНТНгЪНЁЂЩьЫѕБлЪНЕШЖржжРраЭЁЃЙЄзїзАжУЪЧжБНгЭъГЩЭкОђШЮЮёЕФзАжУЁЃЫќгЩЖЏБлЁЂЖЗИЫЁЂВљЖЗЕШШ§ВПЗжНТНгЖјГЩЁЃЖЏБлЦ№ТфЁЂЖЗИЫЩьЫѕКЭВљЖЗзЊЖЏЖМгУЭљИДЪНЫЋзїгУвКбЙИзПижЦЁЃЮЊСЫЪЪгІИїжжВЛЭЌЪЉЙЄзївЕЕФашвЊЃЌвКбЙЭкОђЛњПЩвдХфзАЖржжЙЄзїзАжУЃЌШчЭкОђЁЂЦ№жиЁЂзАдиЁЂЦНећЁЂМаЧЏЁЂЭЦЭСЁЂГхЛїДИЕШЖржжзївЕЛњОпЁЃЛизЊгыаазпзАжУЪЧвКбЙЭкОђЛњЕФЛњЬхЃЌзЊЬЈЩЯВПЩшгаЖЏСІзАжУКЭДЋЖЏЯЕЭГЁЃЗЂЖЏЛњЪЧвКбЙЭкОђЛњЕФЖЏСІдДЃЌДѓЖрВЩгУВёгЭвЊдкЗНБуЕФГЁЕиЃЌвВПЩИФгУЕчЖЏЛњЁЃвКбЙДЋЖЏЯЕЭГЭЈЙ§вКбЙБУНЋЗЂЖЏЛњЕФЖЏСІДЋЕнИјвКбЙТэДяЁЂвКбЙИзЕШжДаадЊМўЃЌЭЦЖЏЙЄзїзАжУЖЏзїЃЌДгЖјЭъГЩИїжжзївЕЁЃ
ФП ТМ
еЊвЊ I
Abstract II
1аїТл 1
1.1ЙњФкЭтбаОПЯжзД 1
1.2ЭкОђЛњЕФЗжРр 3
1.3БОПЮЬтбаОПЕФжївЊФкШн 5
2ЭкОђЛњЖЏБлНсЙЙЕФЩшМЦ 7
2.1ЭкОђЛњЖЏБлЕФзщГЩНсЙЙ 8
2.2ЭкОђЛњЖЏБлЕФЙЄзїдРэ 9
3ЭкОђЛњЖЏБлЕФКИНгЙЄвеЗжЮі 10
3.1ЭкОђЛњЖЏБлгУВФСЯМАЦфКИНгад 11
3.2КИНгРфСбЮЦ 12
3.3ГхЛїШЭад 12
3.4ЭкОђЛњЖЏБлКИНгВФСЯЁЂЙЄвеЗНЗЈМАзАБИ 13
3.5КИНгВФСЯбЁдё 14
3.6ЙЄвеЗНЗЈМАзАБИ 15
4ЭкОђЛњЖЏБлКИНгБфаЮПижЦ 15
4.1КИНгБфаЮЕФжївЊаЮЪНМАВњЩњдвђ 16
4.2ПижЦКИНгБфаЮЕФЗНЗЈ 17
НсТл 18
жТаЛ 19
ВЮПМЮФЯз 20
|
