立式精锻机用液压传动机械手设计(含CAD零件装配图)
来源:wenku163.com 资料编号:WK16311232 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK16311232
资料介绍
立式精锻机用液压传动机械手设计(含CAD零件装配图)(任务书,论文说明书8700字,CAD图纸7张)
本课题通过AutoCAD技术应用的结构设计和液压传动的液压机械手的设计原理,可以实现自动移动的物质运动;在安装工件时,工件进入管道夹紧运动。液压传动型机械手的运动速度的来满足生产力的需求设置。
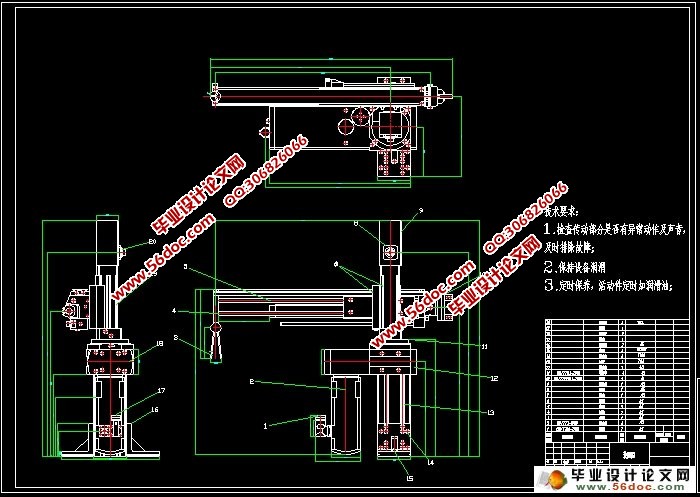
液压传动型机械手结构的设计,3个自由度,液压传动型;
抓重:60Kg;最大工作半径:1700mm;手臂最大中心高:2300mm;
手臂伸缩行程500mm,伸缩速度250mm/s;
手臂升降行程600mm,升降速度160mm/s;
手臂最大回转角度200°,回转速度30°/s;
手腕回转角度180°,回转速度为201°/s。;
手指夹持范围为φ30-φ120mm。

目录
立式精锻机用液压传动机械手设计 1
摘要 1
第一章 液压传动型机械手设计 1
1.1毕业设计目的 1
1.2本课题的内容和要求 2
第二章 抓取机构设计 4
2.1手部设计计算 4
2.2设计计算 7
2.3臂回位夹取机构设计 8
第三章 液压装置设计 11
3.1手部驱动装置 11
3.2旋转液压装置 12
3.3上下垂直滑块液压回路 13
3.4总体结构图 14
第四章 机身机座的结构设计 15
4.1电机的选择 15
4.2减速器的选择 17
4.3螺柱的设计与校核 17
第五章 液压传动型机械手固定方式 19
5.1常用的定位方式 19
5.2 影响因素 19
5.3液压传动型机械手运动的缓冲装置 20
第六章 液压传动型机械手的控制 22
第七章 液压传动型机械手的组成与分类 23
7.1液压传动型机械手组成 23
7.2液压传动型机械手分类 23
总结 25
参考资料 26
|
