The Design of Table Tennis Pickers and Simulation for Move
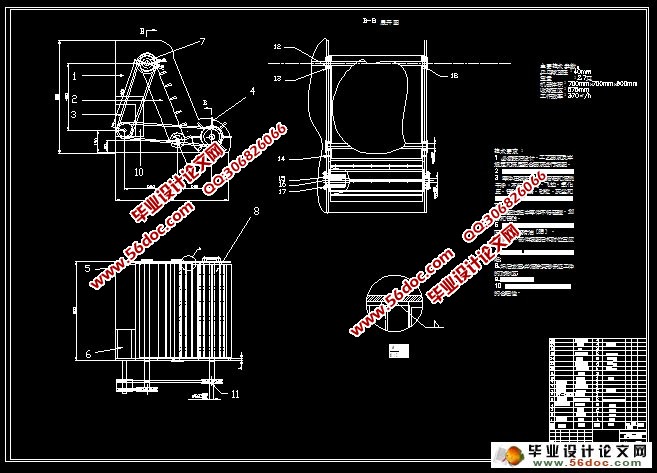
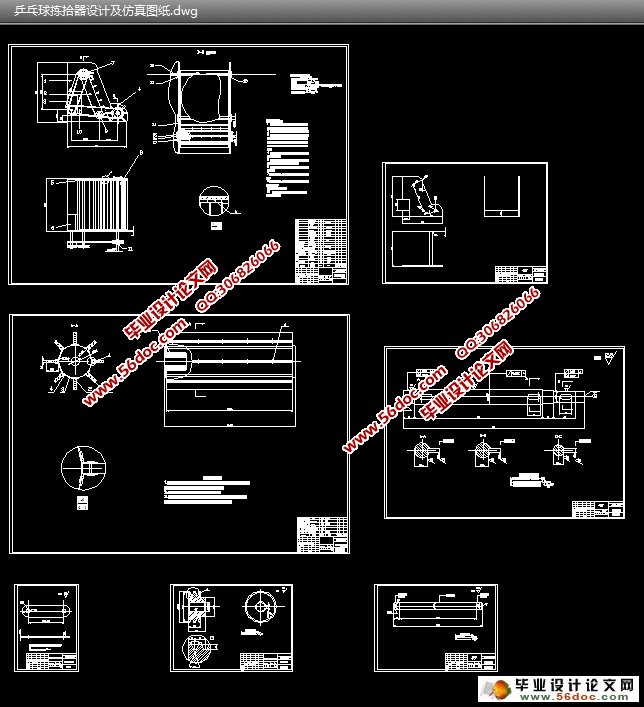
Abstract:The table tennis picker uses a roller brush with the combination of curved baffle structure in the front, makes the roller brush rotate by direct current motor, and puts table tennis into the machinery. Then the imitative belt-type conveyor transmit them into the ball container. When the ball barrel is full, the pressure sensor in the ball bucket block will trigger the circuit signal system to remind the staff. This table tennis picker will be a professional machine which is applicable to medium, large table tennis training base and the training schools in all areas.
Key words: table tennis;single chip microcomputer; DC motor; belt transmission