摘 要
工业机器人一般可理解为:在工业自动化应用领域中的一种自动控制、可重复编程、多功能、多自由度的操作机(固定式的或是移动式的),用于搬运材料、工件、操持工具或检测装置,完成各种作业。
近年来随着工业自动化的发展机械手逐渐成为一门新兴的学科,并得到了较快的发展。机械手广泛地应用于锻压、冲压、锻造、焊接、装配、机加、喷漆、热处理等各个行业。特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手由于其显著的优点而受到特别重视。
机床上料机械手是典型的机电一体化设备,它可自动地为机床抓取工件,取代操作人员频繁取料,降低劳动强度,提高工作效率。
机械手自1999 年投入运行, 工作安全可靠, 效果良好, 可用做数控机床自动上料设备和生产线上的自动抓取设备。几年来, 逐步开发了相关实验、实训教学项目, 以机械手作为实验(训) 载体, 逐步形成了以学生为主体、理论与实践相结合的教学模式, 激发了学生的创造性和动手能力, 为提高学生的工程素质、全面提高学生的综合素质创造了基础条件。
关键词:车床上下料机械手 气压系统 结构设计
Abstract
Industrial robot can generally be understood as: in industrial automation applications in the field of a kind of automatic control, can repeat programming, multi-function, many of the freedom of CaoZuoJi (fixed or movable), used for material handling, workpiece, conducted tools or detection device, finish all kinds of assignments.
In recent years with the development of industrial automation manipulator gradually become a new discipline, and the rapid development. Manipulator is widely used in forging press, stamping, forging, welding, assembling, and machining, paint, heat treatment, and other industries. Especially in heavy, high temperature, toxic and dangerous, radioactive, many dust etc of bad labor environment, due to its advantages of significant manipulator by special attention.
Machine feeding manipulator is typical of electromechanical equipment, it can automatically grab for machine tools, to replace the operators frequently take material, the reduction of labor intensity, improve work efficiency.
Manipulator since 1999 are put into operation, safe and reliable work, the effect is good, can be used as nc machine tools automatic feeding equipment and production line acquirement equipment. For several years, and gradually developed related experiment, practice teaching program in experiments (training) as a manipulator carrier, and gradually formed a take the student as the main body, the theory and the practice teaching mode, stimulate the students' creativity and practical ability, to improve the students' project quality, improve the students' comprehensive quality created the basic conditions.
KeyWords:Lathe up-down material manipulator Pneumatic system Structure design
本篇设计的机械手综合和运用了机械零件、理论力学、材料力学、机械原理、金属工艺学、热处理、技术测量、机械制图等知识,它主要是应用在那些单调、频繁的操作中用以代替人的劳动进行工作,它的主要优点是:
1. 工作时间持久,不会出现人的疲劳,可以重复不断的劳动,维持流水线的正常工作。
2. 对环境适应性强,可以在多粉尘、易燃、易爆、放射性强 等恶劣环境中工作。
3. 运动精确、灵活、特别是在计算机的控制下,可以达到非常高的精度要求。
4. 通用性好,除了特定用途外,适当改变手部,便可以完成喷涂、焊接等。
5. 工作效率高,提高劳动生产率的同时也提高了成本。
本机械手可以根据需要加上行走机构,以便实现远距离操作。

目 录 18000字
摘 要 I
Abstract II
第一章 概述 1
1. 1机械手的发展历史 1
1. 2机械手的发展意义 1
1. 3机械手在机械制造中的应用 2
1. 3.1国外应用 2
1. 3.2国内应用 3
第二章 工业机械手 4
2.1 工业机械手的分类 4
2.2工业机械手的驱动方式 4
2.2.1气压驱动 4
2.2.2液压驱动 5
2.3 工业机械手的设计方法 6
2.3.1手部的设计 6
2.3.2腕部的设计 7
2.3.3臂部的设计要求 8
2.3.4机械手的行程位置检测装置 9
第三章 车床上下料机械手方案比较 12
3. 1工业机械手概述 12
3. 2方案设计和对比 13
3. 2.1方案1 13
3. 2.2方案2 16
3. 2.3方案3 18
3. 2.4方案对比 19
第四章 手部计算与分析 20
4.1 手部计算与分析 20
4.1.1 滑槽杠杆式手部设计的基本要求 20
4.1.2 手部的计算和分析 20
4.2 腕部计算与分析 27
4.2.1 腕部设计的基本要求 27
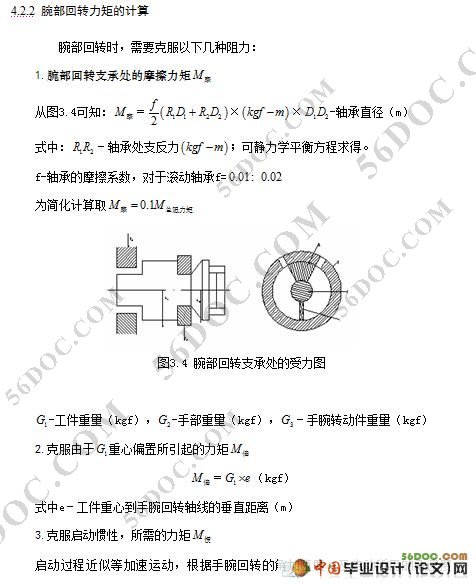
4.2.2 腕部回转力矩的计算 28
4.2.3 腕部摆动油缸设计 31
4.2.4 选键并校核强度 33
4.3 臂部计算与分析 34
4.3.1 臂部设计的基本要求 34
4.3.2 手臂的设计计算 37
4.4 机身计算与分析 45
4.5本章小结 45
结 论 46
参考文献 47
致 谢 48
附 录 50
|
