面向LED封装的XY二自由度的工作台的设计(含任务书,开题报告,论文说明书9000字,外文翻译,cad图纸)
摘要:现代LED封装技术的发展基于数控技术,数控技术和数控机床理所当然的成为制造业关注的焦点。工作台作为被控对象,通过伺服电机实现精密定位,是数控机床不可或缺的部分。
本文以设计面向LED封装的高速、高精密度工作台为目标,以机械动力学理论知识为基础,深入的研究了十字型高速、高精密度定位平台。完成的工作有伺服电机的选型和对工作台机械部件进行选型设计,其中机械部件的选型设计主要包括滚珠丝杠的选型、滚动导轨的选型、轴承和联轴器的选型及主要主要支撑部件的外形设计,确保工作台的定位精度为 ,重复定位精度为 0.015mm。
关键字:工作台 滚珠丝杠副 直线滚动导轨副
Two spends XY being geared to the needs of LED encapsulation to liberty working table
Abstract:The development of modern LED encapsulation technology is based on numerical control technology, the numerical control technology and CNC machine , as a matter of course has become the focus of attention of manufacturing industry. As the controlled object ,Workbench realize precision positioning through servo motoring, which is an integral part of the nc machine tools.
Taking the high-speed and high -precision workable of LED encapsulation as object and mechanical dynamics theory knowledge as basis, this paper researches the cruciformed high-speed, high precision positioning platform thoroughly. The work finished includes the lectotype of servo-actuator and design of mechanical part workbench, in which the type selection of mechanical components includes the selection of ball screw ,rolling guaid ,bearing and coupling , and the configuration design of main propping components to ensure the positioning accuracy of worktable for , repositioning precision for 0.015 mm.
Keywords: workbench ball screw linear rolling guide vice
毕业设计(论文)使用的原始资料(数据)及设计技术要求:
1、X-Y行程范围*:50-400mm;
2、速度范围:10-800mm/s;
3、负载范围:150-2500N;
4、分辨率范围:01-0.01mm;
5、重复定位精度范围:0.003-0.007mm。
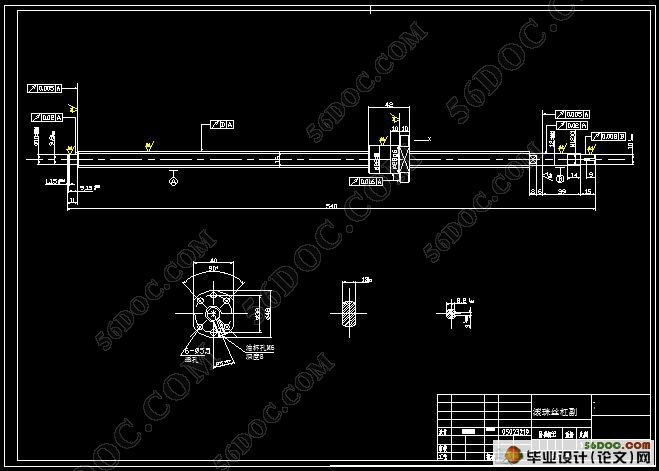
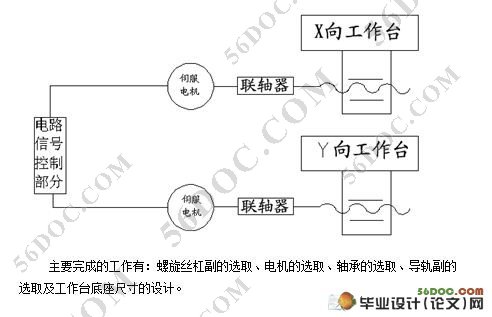
主要完成的工作有:螺旋丝杠副的选取、电机的选取、轴承的选取、导轨副的选取及工作台底座尺寸的设计。
3 螺旋丝杠副的选取
3.1导程的选取
根据任务书选择行程=400mm,最大速度为0.3m/s作为设计目标进行计算。
因为设计要求分辨率范围是0.1mm-0.01mm。粗选导程为5mm,计算分辨率:
S=Ph*A/B
S 最小进给量,mm
A 减速比,即滚珠丝杠副转速/电机转速
Ph 滚珠丝杠副的导程,mm
B 角度测试仪和驱动的分辨率,即每转脉冲数,p/rev
电机与丝杠采取直接连接的方式,所以A=1,伺服马达每转一周的最小分辨率通常随着伺服马达的标准角度测试仪的分辨率(1000p/rev,1500p/rev)而成为
1000p/rev (无倍增)
1500p/rev (无倍增)
2000p/rev (2倍增)
3000p/rev (2倍增)
4000p/rev (4倍增)
6000p/rev (4倍增)
由于分辨率要求达到0.1~0.01mm,先选取1000 p/rev的分辨率和导程5mm代入上式计算得S=0.005mm,所以满足要求,所以选定导程为5mm。
3.2 螺旋传动型式的选取
螺旋传动分为滑动螺旋、滚动螺旋、静压螺旋。其中滚动螺旋广泛用于各种精度的数控机床、加工中心、FMS柔性制造系统、轻功等机构中,且滚动螺旋有如下许多优点:
1. 传动效率高达0.9~0.98,平均为滑动螺旋的2-3倍,可节省动力1/2~3/4,有利于主机的小型化及减轻劳动强度。
2. 摩擦力矩小,接触刚度高,使温升及热变形减小,有利于改善主机的动态特性和提高工作精度。
3. 工作寿命长,平均可达滑动螺旋的10倍左右
4. 传动无间隙,无爬行,运转平稳,传动精度高
5. 具有良好的高速性能,其临界转速之dn值(d为轴径,mm;n为转速,r/min)可达40000以上,可实现线速度120m/min的高速驱动
6. 已经实现系列尺寸标准化,并出现了冷轧滚珠丝杠,提供了多用途的廉价产品
所以本次设计丝杠选用滚珠丝杠
3.3 计算最大速度和各时段的时间
因为行程为400mm,在运行过程中,加速时间与减速时间一般各约为整个运行时间的1/4,设加速度为a
a*t1=Vmax
0.5*a*t1+Vmax*t3 -0.5a*t32 +Vmax*t2=400
计算得t1=t3=1.125 秒t2=2.25秒 a=0.27m/s2
滚珠丝杆的最大转速为
Nmax= Vmax/ph=300/5=60 (转/秒)=3600(转/分)

|
