矿井救援机器人行走机构设计
来源:wenku163.com 资料编号:WK1637018 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK1637018
资料介绍
矿井救援机器人行走机构设计(含开题报告,中期检查表,外文翻译,论文说明书15700字,CAD图纸4张)
摘 要
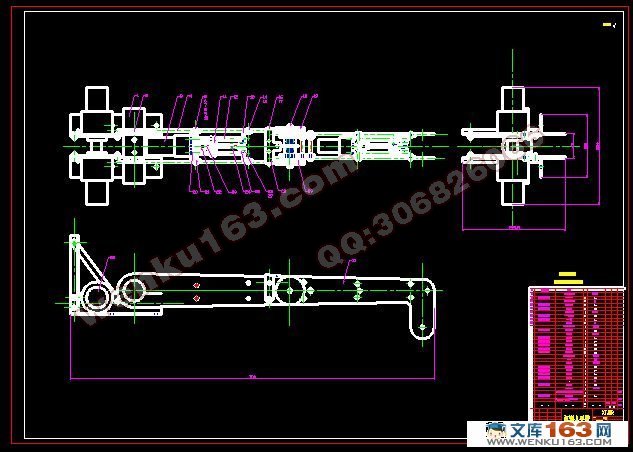
本次设计的是一款履带式搜救机器人基础级载体,设计内容包括设计行走底盘和四自由度手臂以及对机器人的局部受力情况作了具体的分析。设计整体机器人结构。在设计过程中,不断的观察分析其他机器人的结构,吸取前人经验,进行方案比较选定。
本次毕业设计的重点在于机器人的研究设计工作,由于机器人整体的设计难度较大,材料和机构精度要求较高,本设计产品还不能作为成熟产品进行加制造,只能形成设计方案。
关键字:机器人;履带底盘;机械臂;控制电路
Abstract
What this design was a section of marching fire robot foundation level carrier, the design content walks the chassis including the design and the four degrees-of-freedom arms as well as has made the concrete analysis to robot's partial stress situation. Trial manufacturing overall robot structure. In the design trial manufacturing process, the unceasing observation analyzes other robot's structure, absorbs the predecessor to experience, carries on the plan quite to designate. And goes down to the factory to process one to carry on the study, brings to completion the processing technique of manufacture, avoids stepping onto only pauses the written design to be separated from the actual manufacture the tortuous path.
This graduation project's key point lies in robot's trial manufacturing research work, because the robot whole's design difficulty is big, the material and the organization accuracy requirement is high, this trial manufacturing product has not been able to take the mature product to carry on adds the manufacture, can only do for the guidance prototype supplies the reference.
Key words: Robot; Caterpillar band chassis; Mechanical arm; Control circuit
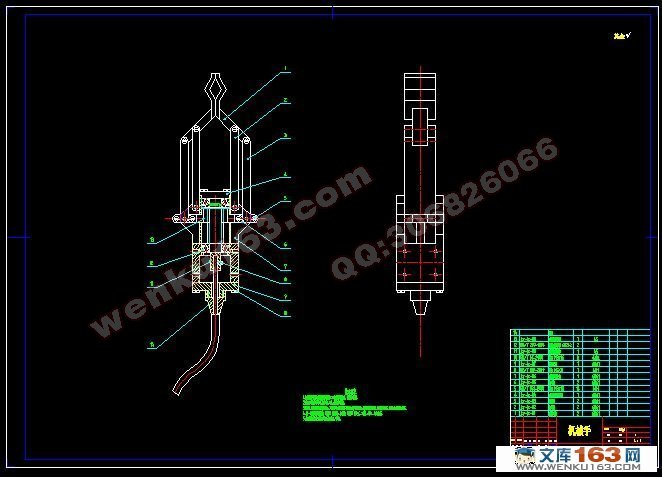
2.3 机械手的设计
机械手的手部是用来抓持工件(或工具)的部件。手部抓持工件的迅速、准确和牢靠程度都将直接影响到机械手的工作性能,它是机械手的关键部件之一。
2.3.1 机械手主要组成:
机械手主要是由执行系统,驱动系统,控制系统三大部分组成。
执行部分
执行系统是机械手的机械传动结构部分。它包括手、手腕、手臂和机座等部件。
驱动系统
驱动系统是驱动执行系统的动力装置。驱动系统有液压驱动,气压驱动,电力驱动和机械驱动等方式。
控制系统
控制系统是支配执行系统按规定程序动作得到电气控制装置。控制系统所控制的因素包括执行系统各部的动作、动作顺序、位置、时间和速度等。
目 录
摘 要 1
Abstract 2
第一章 绪 论 5
1.1 项目概述 5
1.2 目的及意义 5
1.3 国内外发展概况 6
1.4 主要研究内容 10
第二章 方案比较与方案选择 11
2.1 行走机构方案比较 11
2.2 手臂机构方案比较 12
2.2.1 蠕动式机械臂 12
2.2.2 沿X、Y、Z坐标轴直线移动机械臂 12
2.2.3 仿人类手臂式机械臂 13
2.3 机械手的设计 13
2.3.1 机械手主要组成: 13
2.3.2 手部总体确定: 14
2.3.3 手指式手部的类型 14
2.3.4 手部要求: 14
2.3.5 设计时应注意的问题 14
2.3.6 手指夹紧力的计算 15
2.4 驱动力的计算 15
2.5 手臂的设计 16
2.5.1 设计时注意的问题 16
2.5.2 动力的计算 16
第三章 整体机构设计 18
3.1 爬楼梯的力学原理 18
3.2 回转盘机 18
3.2.1构设计机电动机选择 18
3.3 履带驱动轮机构设计机电动机选择 19
3.4部分校核 主要参数计算方法及强度校核 20
3.4.1轮齿传动 20
3.4.2蜗杆传动 23
3.4.3螺纹连接 31
3.5本章小结 37
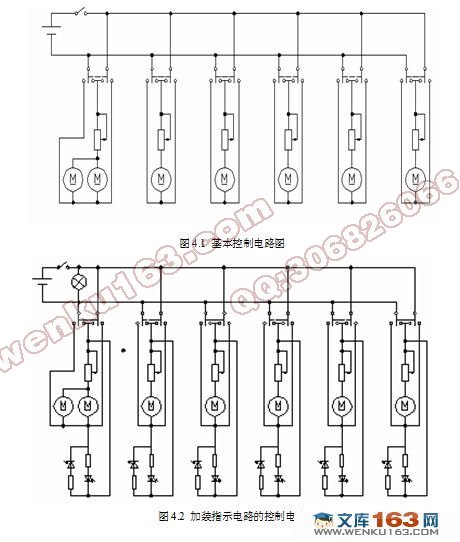
第四章 控制电路及控制器设计 40
4.1控制电路设计 40
4.2 开关元件选用 42
4.3 控制器设计 42
4.4 本章小结 42
第五章 设计总结 44
参考文献 45
致 谢 47
|