基于横摆率反馈的四轮转向系统的仿真研究
来源:wenku163.com 资料编号:WK1638077 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK1638077
资料介绍
基于横摆率反馈的四轮转向系统的仿真研究(含任务书,外文翻译,毕业论文22000字,进度检查表)
摘 要
车辆的四轮转向作为提高车辆操纵稳定性的有效手段已得到广泛认可,许多新的有关四轮转向的观点被不断提出,运用4WS技术可以有效地减小低速行驶时车辆的转弯半径,使车辆在低速行驶时更加灵活。另外,该技术还可以改善车辆在高速行驶时横摆角速度和侧向加速度等瞬态响应指标,提高高速行驶时的操纵稳定性,从而提高车辆的主动安全性。
随着对汽车动力学的深入研究,人们开始认识到,四轮转向系统可以有效地提高汽车低速转向时的机动性及高速转向时的操纵稳定性,因此四轮转向系统在沉寂了多年之后目前又成为底盘控制技术的研究热点。
本文根据牛顿矢量力学体系的动量定理、动量矩定理及牛顿第二定律,推导出二自由度四轮转向汽车动力学模型,以二自由度四轮转向动力学模型为例,对两种经典的四轮转向控制方法进行研究,仿真结果表明这两种控制方法均在一定程度上改善了汽车低速时的机动性及中高速时的操纵稳定性。
关键词:汽车;四轮转向;操纵稳定性;仿真分析
Abstract
The concept of 4WS can improve handing stability which has been accepted widely.Many theories and technologies have been advanced nowadays.The 4WS Call reduce turning radius and increase mobility in low speed.Also 4WS can improve transient respone of yawing rate in high speed and hip speed handing stability.In this way,4WS can get better active safety.
As the thorough researeh onear dynamies,PeoP leare beginning to realize that four- wheelsteering system can effectively improve them obility of car when low-speed steering and the manipulation stability When high-speed steering,therefore,four-wheel steering system now has beeome chassis control technology researeh hotspot againafter silence for many years.
According to momentum theorem and moment of momentum theorem of Newton vector mechanies system,and Newton,5secondlaw,this Paper deduee two degrees four-wheel steering dynamics model.
Key words:Car; Four-Wheelsteering;ManiPulationstability;Simulationanalysis
本课题研究内容
本课题主要研究以下内容:
1) 阐述了课题提出的背景及意义,并简单介绍了4WS技术的发展史及国内外的研究现状。
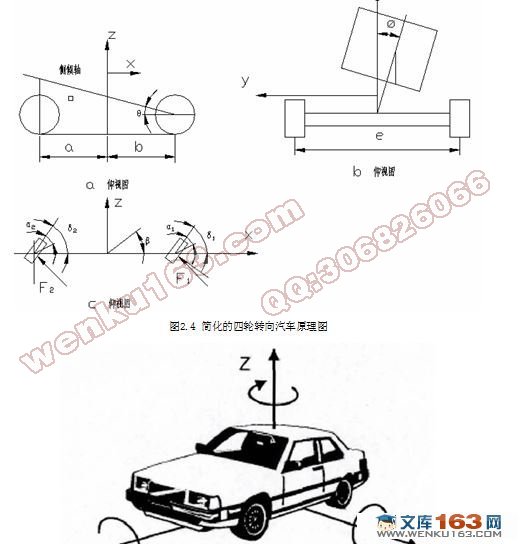
2) 建立4WS汽车的动力学模型,为后续的理论分析及仿真研究做好准备,利用牛顿矢量力学体系及牛顿第二定律,推导出二自由度4WS汽车动力学模型,该模型虽然简单,但是可以通过对它的控制研究来获得4WS汽车的基本转向特性。
3) 基于4WS二自由度基本操纵模型,对4WS汽车的侧向动力学特性进行理论分析,以更加深入了解4WS汽车的优势。主要分析了4WS汽车低速时的转向特性。中高速时的转向特性,并将其与2WS汽车进行比较,验证了4WS汽车具有更好的侧向动力学特性;并对前轮角阶跃输入下的稳态响应和瞬态响应进行了理论推导和定性分析,证明了4WS汽车具有更加良好的稳态响应及瞬态响应特性。
4) 基于二自由度4WS基本操纵模型,对两种控制方法进行了研究。
目 录
摘 要 III
Abstract IV
目 录 V
1 绪论 1
1.1 四轮转向汽车的发展历史及国内外研究概况 1
1.1.1发展历史 1
1.1.2 国内外状况 2
1.2本章研究的背景和意义.................................3
1.3 四轮转向系统控制方法简介 5
1.4 本课题研究内容 7
2 四轮转向车辆的侧向动力学模型 9
2.1 轮胎模型 9
2.1.1 Fiala 轮胎模型 9
2.1.2 G.Gim 轮胎模型 10
2.1.3 Pacejka的“魔术公式 11
2.1.4 郭孔辉的轮胎稳态指数统一模型 12
2.2 4 WS模型车辆动力学分析 13
2.2.1 三自由度汽车的动力学模型 13
2.2.2 二自由度汽车的动力学模型 15
2.3 本章小结 20
3 四轮转向系统不同控制方法的建模 21
3.1 前后轮转角定比例控制的4WS模型 21
3.1.1 前后轮定比例控制的方法研究 21
3.1.2 钱后轮转角定比例4WS系统动力学模型 22
3.2 加入横摆率反馈控制的4WS模型的建立 24
3.2.1横摆率反馈的控制方法研究 24
3.2.2 横摆率反馈的动力学模型...............................25
3.2.3 横摆率反馈的4WS汽车的动态响应特性 27
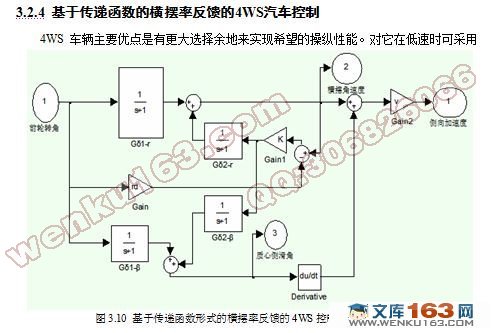
3.2.4 基于传递函数的横摆率反馈的4WS汽车控制 29
3.3 本章小结 30
4 二自由度4WS控制仿真分析 31
4.1 仿真环境 31
4.2 二轮转向与前轮转角比例前馈控制的转向系统的仿真分析 31
4.2.1 仿真所用的参数 31
4.2.2 时域特性仿真 32
4.3 加横摆角速度比例反馈的4WS系统汽车控制 35
4.4 定比例反馈4WS系统与加横摆角速度比例反馈的4WS系统比较 39
4.5 加横摆率反馈控制的4WS车辆的参数研究 41
4.6 本章小结 44
5 结论和展望 45
5.1 结论 45
5.2 展望 45
致 谢 47
参考文献 48
附 录 49
|