换刀机器人机械系统的设计(任务书,开题报告,外文翻译,毕业论文说明书12000字,进度检查表,CAD图纸5张)
摘 要
在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,机械手作为自动化生产线上的重要成员,逐渐被企业所认同并采用。机械手的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,机械手主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
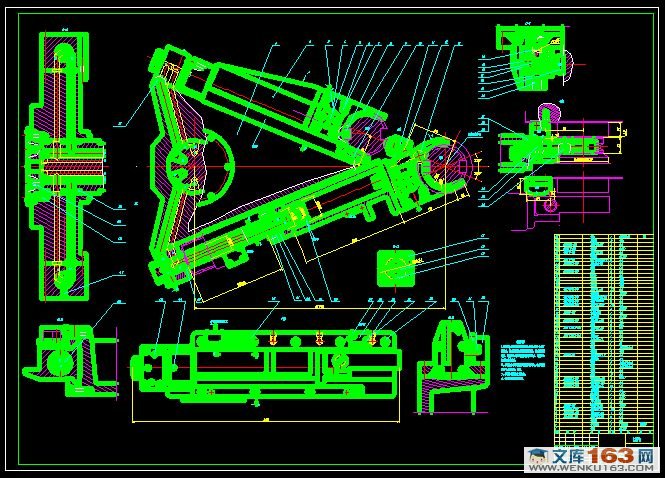
本文将设计一台四自由度的机械手,主要的功用就是自动换刀。主要是实现加工中心自动换刀系统的设计。通过分析加工中心的整体结构和自动换刀系统的特点、应用条件,设计要求等,并结合在数控机床上对刀库和换刀机械手的需要——能在数控程序的控制下灵活的实现换刀过程。刀库为立式单链式刀库。驱动装置采用电机液压驱动;设计的换刀机械手为回转式单臂双手机械手,手指采用弹簧销压紧式,驱动装置采用液压双作用缸。根据机械手和刀库位置的需要,设计机械手在机床上下移动装置,以实现多排刀架上的刀与主轴上的刀之间的交换。结合工厂实际,该自动换刀系统在数控的控制下能灵活的完成换刀程序,节省了时间、提高了效率、安全可靠。
关键词 :机械手;加工中心;刀库;自动换刀
Abstract
In the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality. As an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. The technique level and the, application degree of industrial robots reflect the national level of the industrial automation to some extent, currently, industrial robots mainly undertake the jops of welding, spraying, transporting and stowing etc, which are usually done repeatedly and take high work strength, and most of these robots work in playback way.
In this paper I will design an industrial robot with four DOFs, which is used to carry material for a punch. The subject is to design numerically controlled tool-changing manipulator and numerically controlled tool-magazine. In this progress, the project synthesizes the characteristic and utility condition of numerically controlled tool-changing manipulator and numerically controlled tool-magazine . Numerically controlled tool-changing manipulator adopts rotary single arm and spring pin numerically controlled tool-magazine adopts vertical tool-magazine . Driving gear uses hydraulic cylinder .in a word ,the tool-magazine and the manipulator can do efficiently .reliably and quickly.
Key word : Tool-changing manipulator; Machining Center; Tool-magazine; Automatic Tool Changer
1.1.2课题的目的
通过毕业设计的锻炼,学会综合运用所学的知识和技能进行实际工程问题的分析、综合及设计。培养调查研究、中外文献检索与阅读的能力,掌握定性与定量相结合的独立研究与论证的能力;熟练掌握设计、计算及绘图的能力;锻炼文字与口头表达能力;掌握撰写设计说明书的,并且能设计出合乎实际要求的自动换刀机器人机械系统。
1.1.3研究范围及要达到的技术要求
用途:在给定的程序指令下,配合刀库和卧式镗铣床(简称主机)实现所有加工工序的自动装、卸刀[2]。
技术要求:
结构形式: 圆柱坐标;
自由度数: 4;
负载重量: 10kg(单爪);
末端操作器: 双手爪;
工作空间: 纵向0.195m,横向0.18m,升降1.22m,旋转180°;
运行速度: 五档可调;
最大运行速度: 纵向20m/min,横向16m/min,升降8m/min,旋转16rpm;
重复定位精度: ±0.6m;
记忆刀位数: 不小于170把,可扩展;
总重量: ≧600kg;
目 录
摘 要 III
Abstract IV
目 录 V
1 绪论 1
1.1课题的意义、目的、研究范围及要达到的技术要求 1
1.1.1课题的意义 1
1.1.2课题的目的 1
1.1.3研究范围及要达到的技术要求 1
1.2课题在国内外的发展概况及存在的问题 2
1.2.1国内的发展概况 2
1.2.2国外的发展概况 3
1.2.3存在的问题 7
2 换刀机器人总体设计 9
2.1 主要技术参数和外形尺寸 9
2.1.1 主要技术参数 9
2.1.2 外形尺寸 9
2.2 换刀机器人总体布局设计 10
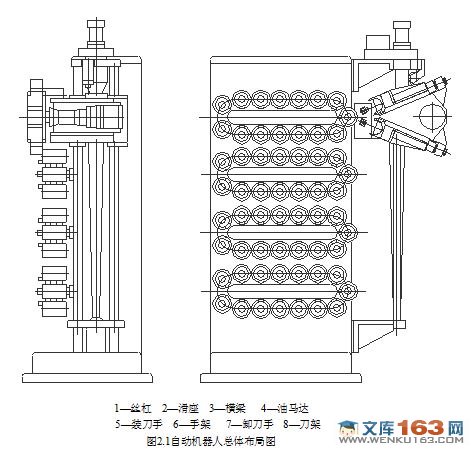
2.2.1 自动换刀机器人的组成及简单介绍 10
2.2.2 自动换刀机器人的总体布局图 10
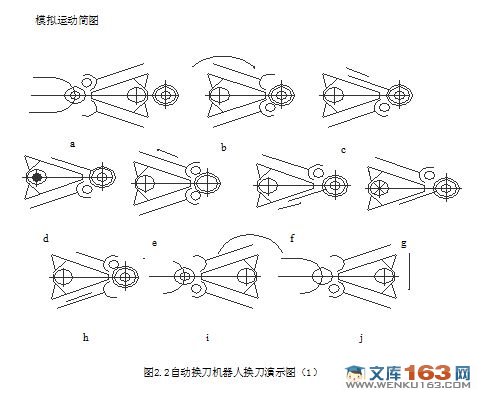
2.3 换刀机器人自动换刀过程 11
3 换刀机器人手部设计 15
3.1 手部的基本结构、组成部分和动作原理 15
3.1.1 机械手的简介 15
3.1.2 换刀机械手的结构、组成与动作原理 15
3.2 手部装置的选择与计算 18
3.2.1 手指的设计 18
3.2.2 手臂油缸的设计与计算 21
第4章自动换刀机器人手部升降机构的设计 27
4.1自动换刀机器人手部升降机构的组成及动作原理 27
4.2滚珠丝杠及螺母副的设计与选用 28
4.3滚珠丝杠螺母副支撑方式及轴承的选择 31
4.4减速齿轮的设计 33
4.5减速齿轮轴的设计 36
4.5.1减速齿轮轴的设计 36
4.5.2 减速齿轮轴的校核 37
4.6驱动液压泵电机的选择 38
5 结论与展望 39
5.1结论 39
5.2不足之处以及未来展望 40
致 谢 41
参考文献 42
|