Design of Bionic Hexapod Robot Mechanism
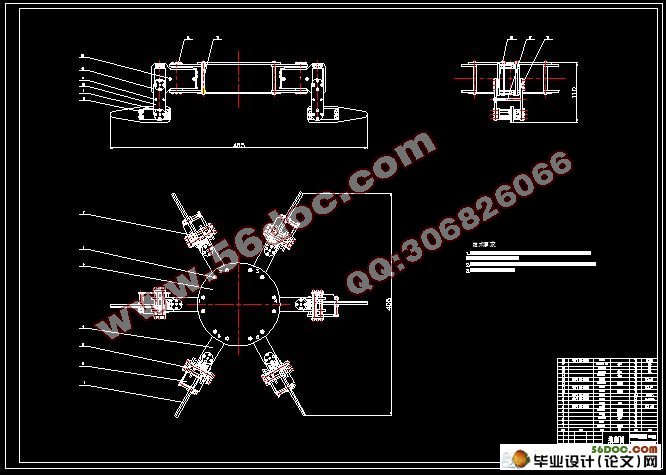
Abstract: The paper has summarized the background and the goal of its topic and has made the simple introduction of the bionic hexapod robot. Through the research of the motion of the six feet of the robot, This design has determined the foot structure,using the analysis of 3 degrees of freedom realizes the forward motion and turning motion of the robot . Picturing of the component and assembly mapping of the bionic hexapod robot as well as the inspection of related parts which ensures the feasibility of the machinery design are both included in the total design.
Key words: bionics ;hexapod robot ;machinery