ТыЖтЛњаЕЪжЕФЩшМЦ(КЌcadСуМўЭМКЭзАХфЭМ)
РДдДЃКwenku163.com зЪСЯБрКХЃКWK1639150 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK1639150
зЪСЯНщЩм
ТыЖтЛњаЕЪжЕФЩшМЦ(КЌcadСуМўЭМКЭзАХфЭМ)(бЁЬтЩѓХњБэ,ШЮЮёЪщ,ПЊЬтБЈИц,жаЦкМьВщБэ,БЯвЕТлЮФЫЕУїЪщ12400зж,CADЭМжН7еХ)
еЊ вЊЃКБОЮФМђвЊНщЩмСЫЙЄвЕЛњЦїШЫЕФИХФюЃЌЛњаЕЪжЕФзщГЩКЭЗжРрЃЌЦјЖЏММЪѕЕФЬиЕуМАЙњФкЭтЕФЗЂеЙзДПіЁЃБОЮФЖдЛњаЕЪжНјаазмЬхЗНАИЩшМЦЃЌШЗЖЈСЫЛњаЕЪжЕФММЪѕВЮЪ§ЁЃЭЌЪБЃЌЩшМЦМЦЫуСЫЛњаЕЪжЕФЩ§НЕБлКЭЛизЊБлНсЙЙЃЌЩшМЦСЫЛњаЕЪжЕФЪжВПНсЙЙЁЃБОЮФЯЕЭГЕибаОПСЫЛњаЕЪжЕФЦјЖЏЯЕЭГЃЌЖдЦјбЙЯЕЭГЙЄзїдРэЭМЕФВЮЪ§НјааСЫСЫНтЃЌДѓДѓЬсИпСЫЛцЭМаЇТЪКЭЭМжНжЪСПЁЃ
ЙиМќДЪЃКЙЄвЕЛњЦїШЫЃЛЛњаЕЪжЃЛЦјЖЏ
Design of the Automatic Manipulator for Palletizing
Abstract: This paper briefly introduces the concept of industrial robots, composition and classification of the manipulator, the characteristics of pneumatic technology development status of home and abroad. This paper makes an overall design of manipulator, determine the technical parameters of manipulator. Meanwhile, design and calculation of the manipulator lifting arm and rotating arm structure, design of manipulator hand structure. The paper systematically studies the manipulator of pneumatic system, pneumatic system working principle diagram and parameters of understanding, greatly improving the efficiency of drawing and drawings quality.
Key words: industrial robot;manipulator; pneumatic
ПЮЬтЕФжївЊШЮЮё
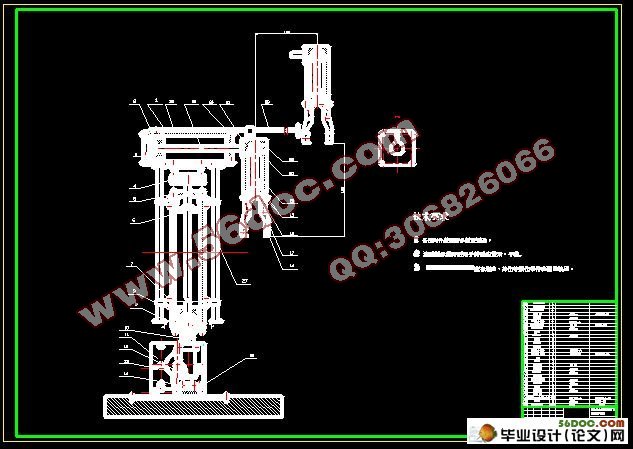
(1) НјааЦјЖЏЛњаЕЪжЕФзмЬхбаОПЃЌВЂНјааећЬхдЫЖЏЗНЪНЩшМЦЃЛ
(2) ЖдЦјЖЏЛњаЕЪжЦјТЗСЫНтЃЌНјааЙиМќВПМўЕФбаОПЃЌЭъГЩЦјЖЏЗЇзљСуМўЭМЁЃ
(3) ЩшМЦЦјЖЏЛњаЕЩ§НЕБлЛизЊБлВПЗжНсЙЙЃЌНјааЙиМќВПМўЕФЩшМЦМЦЫуЃЛЭъГЩЦјЖЏЛњаЕЪжЩ§НЕБлНсЙЙзАХфЭМЁЂЦјЖЏЛњаЕЪжЛизЊБлНсЙЙзАХфЭМЁЃ
ЩшМЦЕФЦјЖЏЛњаЕЪжЩьЫѕааГЬЮЊ200mmЃЌЩЯЯТааГЬЮЊ300mmЃЌа§зЊ180ЖШЃЛзЅЮеСуМўжиСП150N ЁЃ
ЖўЁЂЩшМЦММЪѕВЮЪ§
1ЁЂзЅжиЃК150N
2ЁЂздгЩЖШЪ§ЃК3ИіздгЩЖШ
3ЁЂзљБъаЭЪНЃКдВжљзљБъ
4ЁЂзюДѓЙЄзїАыОЖЃК450mm
5ЁЂЪжБлдЫЖЏВЮЪ§
ЩьЫѕааГЬ200mmЃЌИКди230N
ЩьЫѕЫйЖШ
Щ§НЕааГЬ300mmЃЌИКди300N
Щ§НЕЭЦГіЫйЖШ ЃЌЩ§НЕЫѕЛиЭЦГіЫйЖШ
ЛизЊЗЖЮЇ ЃЌИКди22KG
ЛизЊЫйЖШ
6ЁЂЖЈЮЛЗНЪН
ааГЬПЊЙи
7ЁЂЖЈЮЛОЋЖШ
8ЁЂЧ§ЖЏЗНЪН
ЦјбЙДЋЖЏ
9ЁЂПижЦЗНЪН
ЕуЮЛГЬађПижЦ(ВЩгУPLC)


ФП ТМ
еЊвЊ 1
ЙиМќДЪ 1
1 ЧАбд 2
1.1 ЙЄвЕЛњаЕЪжЕФИХЪі 2
1.2 ЛњаЕЪжЕФзщГЩМАЗжРр 3
1.2.1 ЛњаЕЪжЕФзщГЩ 3
1.2.2 ЛњаЕЪжЕФЗжРр 3
1.3 PLCгыДЅУўЦСИХЪі 5
1.4 ЙњФкЭтЗЂеЙзДПі 5
1.5 ПЮЬтбаОПФкШн 6
1.5.1 ПЮЬтЕФЬсГі 6
1.5.2 ПЮЬтЕФжївЊШЮЮё 7
2 ЛњаЕЪжЕФЩшМЦЗНАИ 8
2.1 ЛњаЕЪжжївЊРраЭКЭздгЩЖШЕФбЁдё 8
2.2 ЛњаЕЪжЕФЧ§ЖЏЗНАИЩшМЦ 8
2.3 ЛњаЕЪжЕФПижЦЗНАИЩшМЦ 9
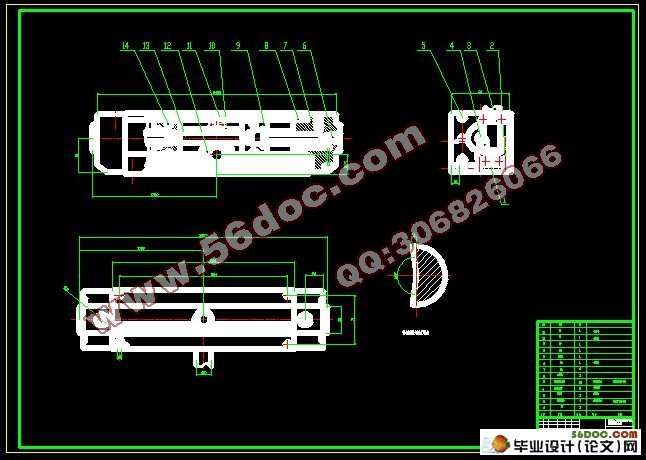
2.4 ЛњаЕЪжЕФЪжВПНсЙЙЗНАИЩшМЦ 9
2.5 ЛњаЕЪжЕФЪжБлНсЙЙЗНАИЩшМЦ 9
2.6 ЛњаЕЪжЕФжївЊВЮЪ§ 9
2.7 ЛњаЕЪжЕФММЪѕВЮЪ§Са 9
3 ЪжВПНсЙЙЕФбЁдёЃЌЪжБлЩьЫѕЃЌЩ§НЕЃЌЛиа§ЦјИзЕФЩшМЦгыаЃКЫ 10
3.1 МаГжЪНЪжВПНсЙЙ 10
3.1.1 ЪжжИЕФаЮзДКЭЗжРр 10
3.1.2 ЩшМЦЪБзЂвтЕФЮЪЬт 11
3.2 Щ§НЕЛњЕФГпДчЩшМЦгыаЃКЫКЭЩьЫѕИзЕФбЁдё 11
3.2.1 ЦјИзЕФЗжРр 11
3.2.2 Щ§НЕЦјИзЕФГпДчЩшМЦгыаЃКЫ 13
3.2.3 ЩьЫѕИзЕФбЁдё 19
3.3 Лиа§ЦјИзЕФГпДчЩшМЦгыаЃКЫ 19
4 ЦјЖЏЯЕЭГЩшМЦ 22
5 НсТл 23
ВЮПМЮФЯз 23
жТаЛ 23
|
