ЖрзІздЖЏАсдЫЛњЦїШЫЩшМЦ(КЌcadСуМўЭМКЭзАХфЭМ)
РДдДЃКwenku163.com зЪСЯБрКХЃКWK1639156 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK1639156
зЪСЯНщЩм
ЖрзІздЖЏАсдЫЛњЦїШЫМЦ(КЌcadСуМўЭМКЭзАХфЭМ)(ШЮЮёЪщ,БЯвЕТлЮФЫЕУїЪщ19000зж,CADЭМжН6еХ)
еЊ вЊЃКЙњФкЭтДѓбЇЩњжЧФмЛњЦїШЫЪЧвЛИіЖржжИпаТММЪѕЕФМЏГЩЬхЃЌЫќШкКЯСЫЛњаЕЁЂЕчзгЁЂДЋИаЦїЁЂМЦЫуЛњгВМўЁЂШэМўЁЂШЫЙЄжЧФмЕШаэЖрбЇПЦЕФжЊЪЖЃЌЩцМАЕНЕБНёаэЖрЧАбиСьгђЕФММЪѕЁЃБОЮФЪЧвдЕкЪЎНьбЧЬЋЛњЦїШЫДѓШќЮЊБГОАЖјЩшМЦЕФздЖЏЛњЦїШЫЃЌЫќВЩгУКЯРэЕФЛњЙЙЃЌОЙ§ЧЩУюЕФНсКЯЃЌЖјДяЕНОЋШЗПьЫйЭъГЩШЮЮёЕФвЊЧѓЁЃ
ЙиМќДЪЃКЛњЦїШЫЃЛЛњЙЙЃЛзМШЗЃЛПьЫй
More Claws Automatic Handling Robot
AbstractЃКthe college 's high-tech intelligent robot is a multi-body integration at home and abroad, which combines knowledge of mechanics, electronics, sensors, computer hardware, software, artificial intelligence and many other disciplines,and involves many of today's technology in the frontier. This article is based on the Tenth Asia-Pacific Robot Contest ,and designed a automatical robot,the robot use rational structure, by the combination of ingenious,it can complete the task precisely and rapidly.
Key wordsЃКRobotЃЛAgenciesЃЛAccurateЃЛFast
жївЊФкШнКЭвЊЧѓ
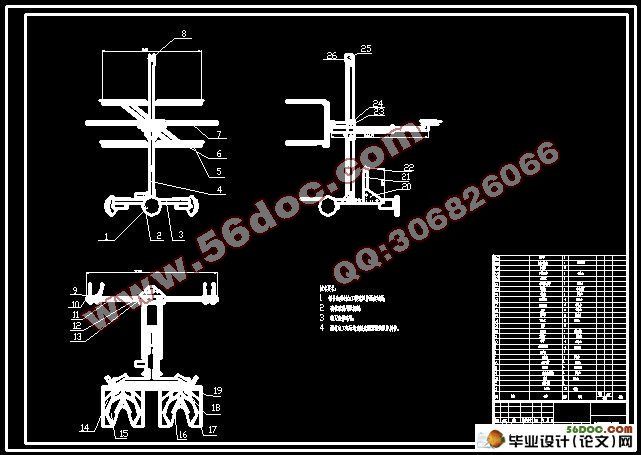
1. ИУЩшМЦжївЊРДдДгкЕкЪЎНьбЧЬЋЧјДѓбЇЩњзджЦЛњЦїШЫБШШќжїЬтЃЌжївЊЩшМЦвЛИіздЖЏЛњЦїШЫЃЌИУЛњЦїШЫФмЙЛАДДѓШќвЊЧѓжЦзїЕФЫЎЕЦЛЈАъМАжђЬЈздЖЏАсдЫЕНжИЖЈЮЛжУ”ЁЃ
2ЃЎИУЛњЦїШЫФмЙЛдкЖўЪЎУыжгФкЭъГЩЕРОпЕФАсдЫЙЄзїЃЛ
3. ИУЛњЦїШЫжиСПВЛЕУГЌЙ§Ш§ЪЎНяЃЛ
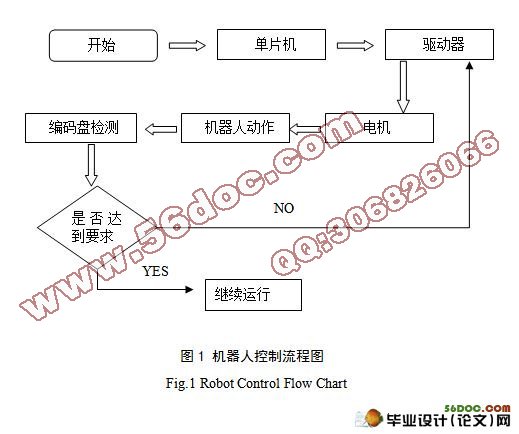
4.ИУЛњЦїШЫВЩгУЕЅЦЌЛњЛђепARM3зїЮЊДІРэЦїЃЌПеаФБЕчЛњзїЮЊЧ§ЖЏЖЏСІЁЂВЩгУЙтЕчБрТыХЬзїЮЊМьВтЪжЖЮЁЂКьЭтВтОрДЋИаЯЕЭГЃЌИЈвдЕчдДМрПиЕчТЗЁЂЫХЗўПижЦЕчТЗЙЙГЩЛњЦїШЫПижЦгВМўЕчТЗЯЕЭГЃЛ
5.ЛњЦїШЫгІДјгаздЪЪгІГЁЕиЁЂЕЦЙтЩшМЦЃЌвдЪЪгІВЛЭЌГЁЕиЃЛ

ФП ТМ
еЊ вЊ 1
ЙиМќДЪ 1
1ЧАбд 1
2змЬхЗНАИЕФЩшМЦ 2
2.1змЬхЩшМЦЭМ........................................................2
2.2ЛњЦїШЫЩшМЦЕФвЊЧѓ..................................................2
2.3ЛњЦїШЫЩшМЦЕФддђ..................................................3
3ЛњЦїШЫЛњаЕЩшМЦ 3
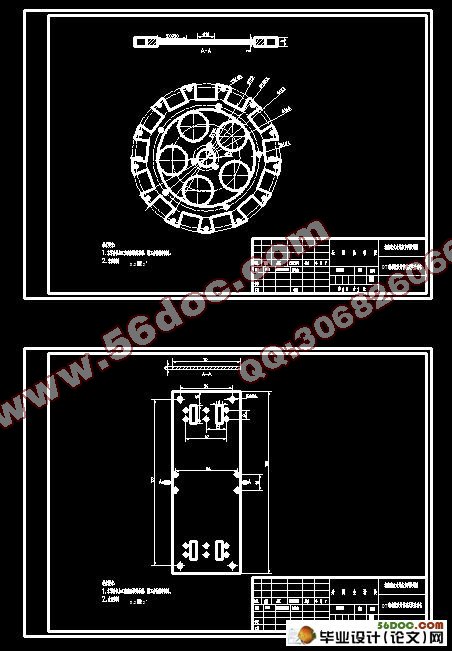
3.1ЕзХЬКЭТжзгЕФбЁдёгыЩшМЦ 3
3.2ИїТжЯЕЕФНсЙЙКЭЬиад 6
3.3Щ§НЕЬхЩшМЦ 7
3.4 ДЋЖЏЩшМЦ...................................................9
3.5 ЛЌПщЩшМЦ...................................................9
3.6 зІзгЕФЩшМЦЫМТЗ...................................................9
3.7 зІзгЭаХЬЕФЩшМЦ..................................................10
3.8вЁИЫЩшМЦ...................................................11
4ЕчзггВМў.............................................................12
4.1ЖЏСІТжЕчЛњЕФбЁдё.................................................12
4.2ЕчЛњЫХЗўЦїПижЦ 13
4.3БрТыХЬВЩбљ 15
4.4ЙтЕчДЋИаЦї.......................................................16
5ЛњЦїШЫжїПижЦАхгВМўЩшМЦ...............................................18
5.1жїПиАхгВМўЪЕЮяЭМ.................................................18
5.2 AVRЕчдДФЃПщ.....................................................18
5.3зюаЁЯЕЭГ.........................................................18
5.4ШЫЛњНЛЛЅНчУц.....................................................19
6змНс.................................................................24
ВЮПМЮФЯз 24
жТаЛ 25
ИНТМ 26
|
