ЙЄвЕЛњЦїШЫ(ЛњаЕЪж)ЩшМЦ(КЌШЮЮёЪщ,ПЊЬтБЈИц,ЭтЮФЗвы,БЯвЕТлЮФЫЕУїЪщ17000зж,НјЖШМьВщБэ,CADЭМжН9еХ)
еЊ вЊ
дкЩњВњЙ§ГЬЙЄвЕЛњаЕЪжЪЧФЃФтШЫЪжЖЏзїЕФЛњаЕЩшБИЃЌЫќПЩвдЬцДњШЫЙЄАсдЫжиЮяЛђЕЅЕїЃЌдкИпЗлГОЃЌИпЮТЃЌгаЖОЃЌвзШМЃЌЗХЩфадКЭЦфЫћЯрЖдНЯВюЕФЙЄзїЛЗОГЁЃЛњЦїШЫПЩгУгкдкЩњВњЙ§ГЬжаЕФздЖЏЛЏзЅзЁВЂвЦЖЏЙЄМўздЖЏЛЏЩшБИЃЌЫќЪЧдкЩњВњЙ§ГЬЕФЛњаЕЛЏКЭздЖЏЛЏЃЌПЊЗЂГівЛжжаТЕФРраЭЕФЩшБИЁЃНќФъРДЃЌЫцзХЕчзгММЪѕЃЌЬиБ№ЪЧМЦЫуЛњЕФЙуЗКЪЙгУЛњЦїШЫЕФПЊЗЂКЭЩњВњЕФИпПЦММСьгђвбГЩЮЊбИЫйЗЂеЙЦ№РДЕФвЛЯюаТаЫММЪѕЃЌЫќИќДйНјЛњЦїШЫЕФЗЂеЙЃЌЪЙЕУЛњаЕЪжФмИќКУЕиЪЕЯжгыЛњаЕЛЏКЭздЖЏЛЏЕФгаЛњНсКЯЁЃЛњаЕЪжФмЙЛДњЬцШЫРрЭъГЩЮЃЯеЁЂМѕЧсШЫРрРЭЖЏЧПЖШЁЂжиИДПндяЕФЙЄзїЃЌЬсИпРЭЖЏЩњВњСІЁЃ
БОЩшМЦЪЧЙигкШ§здгЩЖШЕФдВжљаЮЛњаЕЪжЁЃРћгУAuto CADШэМўЖджЦМўНјааЩшМЦЛцЭМЁЃЦфАќРЈМаГжЦїЁЂаЁБлЁЂДѓБлКЭЕззљЁЃУїШЗКЯРэЕФЩшМЦЫМТЗЃЌШЗЖЈСЫЛњаЕЪжЙЄзїдРэВЂЖдШЛМаГжЦїЁЂЦјИзЁЂВННјЕчЛњЁЂжсГаНјааСЫаЃКЫМЦЫуВЂИНДјСЫМђЭМВЂЖдСуМўЕФжЪСПЁЂжиаФЁЂЙпаджїжсКЭЙпадСІОиНјааИЈжњЩшМЦМЦЫуЃЌПЩвдДѓДѓМѕЧсдкЩшМЦЙ§ГЬжаЗБЫіМЦЫуМАаЃКЫВНжшЁЃ
ЙиМќзжЃКЛњаЕЪжЃЌЦјИзЃЌаЃКЫЁЃ
Abstract
Industrial manipulator is the mechanical equipment which is used in the production process and simulate to the behave of hands with electrical integration. It can carry heavy objects and work in the harsh environment which is high temperature, poisonous ,full of dust, flammable and combustible monotonous and full of radioactive substance instead of people. Manipulator is a automatic device which is used in the automatic production process and it can carry and move things. It is a new device which is developed in the mechanization and automatic production process. In recent years , with the widely used of electronic technique especially the electronic computer. The research and production of robot has became a new technology which is developing rapidly in the high-tech industry . It promotes the development of manipulator. It makes the combination of the manipulator with mechanization and automation become easier . Manipulator can complete the dangerous and boring work instead of people. It can reduce labour intensity of people and raise the labour productivity .
This design is a cylindrical manipulator which is related to delta degrees of freedom. It designs and draws the picture with Auto cad software ,it includes holder, a small arm, the big arm and the base. The clear and reasonable thinking determines the working principle of the manipulator . This also checks and calculates the holder, cylinder, stepper motor and bearing. Apart from this , it contains some pictures and design and measure the quality , barycentre principal axis of inertia and force of parts. It can greatly reduce the complicated calculation and check in the design process.
Keywords: robot, cylinder, checking
ФтВЩШЁЕФбаОПЗНЗЈЁЂММЪѕТЗЯпЁЂЪЕбщЗНАИМАПЩааадЗжЮі
ЙЄвЕЛњЦїШЫФПЧАвбГЩЮЊДѓЙцФЃжЦдьвЕжазїздЖЏЛЏЩњВњЯпЩЯЕФживЊГЩдБЁЃЙЄвЕЛњЦїШЫЕФММЪѕЫЎЦНКЭгІгУГЬЖШдквЛЖЈГЬЖШЩЯЗДгГСЫвЛИіЙњМвЙЄвЕздЖЏЛЏЕФЫЎЦНЁЃ
БОПЮЬтЪєЙЄГЬЩшМЦРрПЮЬтЃЌвЊЧѓЭъГЩЙЄвЕЛњЦїШЫЕФзмЬхКЭСуВПМўНсЙЙЩшМЦЁЃЭЈЙ§БОЩшМЦЃЌПЩвдАяжњбЇЩњМгЩюЖдБОзЈвЕЕФЯрЙижЊЪЖРэНтКЭЬсИпзлКЯдЫгУзЈвЕжЊЪЖФмСІЁЃ
ЙЄвЕЛњаЕЪжЩшМЦФкШн
ЛњЕчвЛЬхЛЏММЪѕЪЧМЏКЯЛњаЕЙЄГЬЁЂДЋИаММЪѕЁЂаХЯЂДІРэММЪѕЕШаЮГЩЕФвЛжжзлКЯЕФММЪѕЁЃОЁЙмЛњЕчвЛЬхЛЏЕФВњЦЗжжРрБШНЯЖрЃЌЕЋгЩгкЫћУЧаЮЪНКЭИДдгГЬЖШЛЙгаЙІФмЕФВЛЭЌЃЌзіЙЄЕФЛњаЕБОЬхВПЗжЪЧзюЛљБОЕФЃЌБиВЛПЩЩйЕФвђЫиЁЃЙЄвЕЛњаЕЪжЕФЩшМЦдкФкШнКЭжЊЪЖЛЙгаЩюЖШЩЯЖМЪЧЪЪжаЕФЁЃ
ЮвУЧЫљвЊЩшМЦЕФЪЧФтЖЈећЬхЕФЗНАИЃЌЧ§ЖЏзАжУКЭДЋЖЏзАжУЕФЗНАИЁЃИљОнздгЩЖШбЁдёКЭКЯЪЪЕФВЮЪ§бЁдёКЯЪЪЕФЪжВПКЭЭѓВПЛЙгаБлКЭЛњЩэЕФНсЙЙЁЃЭъГЩИїВПЗжЕФМЦЫуЁЃЙЄвЕЛњаЕЪжЙЄзїзАХфЭМЕФЩшМЦгыЛцжЦЁЃЦјбЙЯЕЭГЕФЩшМЦЁЃЛњаЕЪжЕФдЫЖЏЗжЮіЁЃзюКѓаДЩЯЫЕУїЪщЁЃ

ФПТМ
еЊ вЊ III
ABSTRACT IV
ФПТМ V
1 аїТл 1
1.1 БОПЮЬтбаОПЕФФкШнКЭвтвх 1
1.2 ЙњФкЭтЗЂеЙИХПі 1
1.3 ЙЄвЕЛњаЕЪжЩшМЦФкШн 2
1.4 ЛњаЕЪжЩшМЦЕФзїгУ 2
1.5 ЙЄвЕЛњаЕЪжЕФЗжРрКЭзщГЩ 2
2 ЪжВПЕФЩшМЦ 5
2.1 ЛњаЕЪжЩшМЦВЮЪ§КЭдЫЖЏЗНАИ 5
2.1.1 дЫЖЏЗНАИ 5
2.1.2 Ч§ЖЏЯЕЭГКЭЮЛжУМьВтзАжУЕФбЁдёЃК 5
2.2 ЪжВПЩшМЦЕФНсЙЙКЭМЦЫу 6
2.2.1 ЛњаЕЪжЕФЛљБОвЊЧѓ 6
2.3 ЪжВПСІЕФМЦЫу 7
2.3.1 МаНєСІЕФМЦЫу 7
2.3.2 ЪжзІЧ§ЖЏЦјИзЕФЩшМЦ 8
2.3.3 ЪжВПЮѓВюЕФЗжЮі 10
3 ЛњаЕЪжБлЕФЩшМЦ 12
3.1 ЛњаЕаЁБлЩшМЦ 12
3.1.1 аЁБлЧ§ЖЏСІЕФМЦЫу 12
3.1.2 аЁБлЧ§ЖЏЦјИзЕФЩшМЦ 13
3.1.3 ЦјИзЭВБкКё ЕФМЦЫу 14
3.1.4 ЦјИзЕФбЁгУ 14
3.1.5 аЃКЫЛюШћЕФЮШЖЈад 14
3.1.6 аЁБлИеЖШаЃКЫ 15
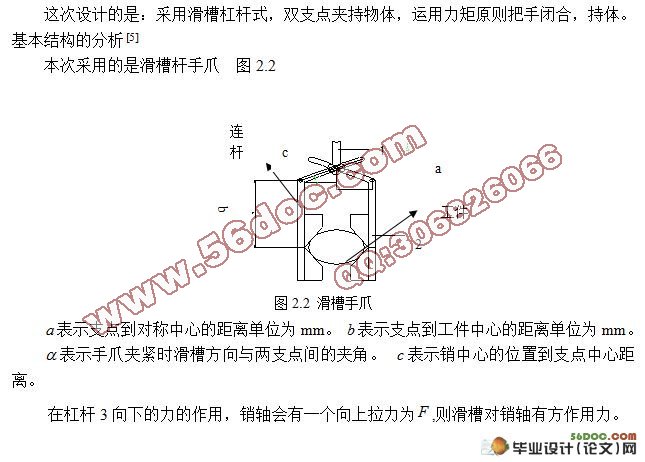
3.1.7 ЖЫИЧЕФСЌНгЗНЪНМАЧПЖШМЦЫу 15
3.2 ДѓБлЕФНсЙЙЩшМЦ 17
3.2.1 ДѓБлЕФНсЙЙКЭвЊЧѓ 17
3.2.2 Ч§ЖЏСІЕФМЦЫу 17
3.2.3 ДѓБлЧ§ЖЏЦјИзЕФЩшМЦ 17
3.2.4 ЦјИзЕФбЁдё 18
3.2.5 аЃКЫЛюШћЕФЮШЖЈад 18
3.2.6 ДѓБлИеЖШаЃКЫ 19
4 Ч§ЖЏЯЕЭГЩшМЦ 20
4.1 жсГаЕФЩшМЦ 20
4.1.1 жсГаЕФбЁдё 20
4.1.2 жсГаЕФМЦЫуЃК 20
4.1.3 жсГаЕФЪйУќаЃКЫЃК 21
4.2 ЕчЛњЕФЛљБОЧщПіКЭбЁдё 22
4.2.1 ЕчЛњЕФбЁдђгыМЦЫу 22
4.2.2 зЂвтЪТЯю 23
4.2.3 ЙЄзїдРэ 24
4.2.4 ВННјЕчЛњЕФЬиЕу 24
4.3 аГВЈМѕЫйЦї 24
4.3.1 аГВЈМѕЫйЦїЕФМђНщ 24
4.3.2 аГВЈМѕЫйЦїЕФЩшМЦ 25
4.4 бќзљЕФНсЙЙ 26
5 зм Нс 28
жТ аЛ 29
ВЮПМЮФЯз 30
ИН ТМ 31
|
