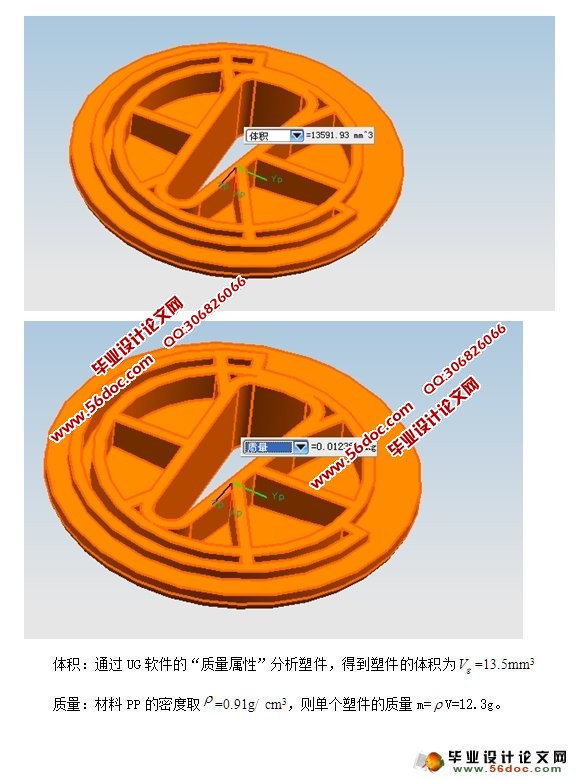
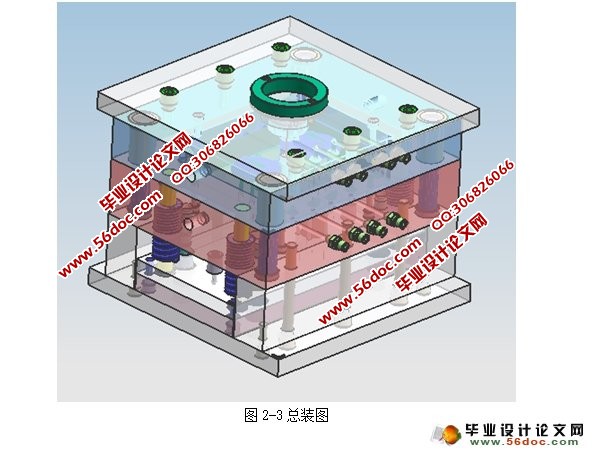
拎手旋件模具设计(UG三维,含模流分析) 来源:wenku163.com 资料编号:WK16310789 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK16310789 我要下载该资源 资料介绍 拎手旋件模具设计(UG三维,含模流分析)(设计说明书7000字,UG三维图,模流分析) 由于塑件属于圆筒形薄壁深壳状零件,我们采用哈夫机构成型塑件的手柄,考虑到实际使用情况,杯口和杯外表面必须有很高的光滑度,可见用顶杆顶出是不可行的,这里我们使用推板顶出装置。 工作过程:开模后,受到压缩的弹簧回复原始状态。合模时,哈夫机构在斜导柱的引导下复位,顺利完成合模。 目 录 目 录 III 1.引言 1 2.塑料工艺分析与模具方案确定 2 2.1 制件的分析 2 2.2 模具方案的初步确定 3 2.3总装图 3 3. 塑料的成型特性及工艺参数 4 4. 注塑设备的选择 5 4.1 计算塑件的体积和重量 5 4.2 选择设备型号、规格、确定型腔数 6 5. 浇注系统 7 5.1 确定成型位置 7 5.2 分型面的选择 7 5.3 浇口套的选用 8 6. 脱模机构的设计 9 6.1 顶出机构 9 6.2 脱模力的计算 9 7. 温度调节机构的选择 10 7.1模具温度调节对塑件质量的影响 10 7.2冷却系统的设计原则 10 7.3冷却装置的布置如下 11 8. 注射机有关工艺参数的校核 12 8.1 注射量的校核 12 8.2 锁模力与注射压力的校核 12 8.2.1锁模力的校核 12 8.2.2注射压力的校核 13 8.3 材料厚度与注射机开模行程的校核 13 9. 成型零部件的设计与计算机构形式 14 9.1 成型零部件的结构形式 14 9.1.1凹模的结构设计 14 9.1.2型芯的结构设计 14 10. 模架、支承与连接零件的设计与选择 15 11 合模导向与定位机构的设计 16 11.1 导柱导向机构 16 11.2 导向孔、导套的结构及要求 17 11.3 导柱布置 17 12. 排气与引气系统 17 12.1.1排气系统的作用及气体来源 17 12.1.2排气系统的设计要点 17 12.2引气装置 18 总结 19 致谢 21 参考文献 22